Voici plusieurs décennies que l’informatique accompagne l’industrie aérospatiale, au sol mais aussi dans l’espace. Retour sur les grandes étapes de cette épopée…
L’histoire de la conquête spatiale est plus ou moins liée à celle de l’informatique : très rapidement, et malgré l’existence au sol de superordinateurs, la présence d’un ou plusieurs calculateurs dans les engins spatiaux s’est montrée indispensable pour effectuer en temps réel les calculs nécessaires au guidage, à la surveillance des systèmes ou encore aux manœuvres.

L’informatique « spatiale » doit toutefois faire face à bien plus de contraintes que ce que les ordinateurs au sol ont à endurer. En plus des contraintes physiques (accélérations et températures extrêmes), les ordinateurs, calculateurs et processeurs doivent en effet être le moins sensibles possibles aux radiations et aux émissions radio. Ils doivent également être « silencieux » d’un point de vue radiofréquences : l’horloge interne d’un CPU peut en effet rapidement se comporter comme un mini-émetteur RF et interférer avec le reste des systèmes ! Nous allons dans ce dossier retracer l’évolution des calculateurs et processeurs dans l’espace, des années 1960 à nos jours.
La NASA veut un processeur HPSC 100 fois plus performant que les solutions actuelles
(1965) Gemini : Gemini Digital Computer
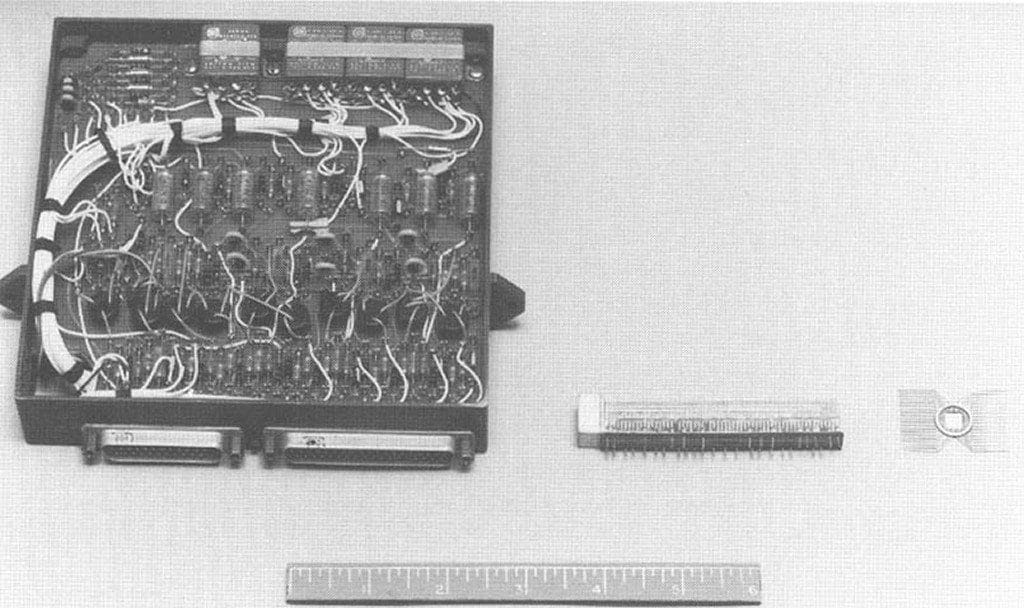
Lancées à partir de 1965, les capsules Gemini sont parmi les premiers vaisseaux spatiaux à embarquer un « calculateur » (on ne peut pas encore parler de véritable processeur) : le Gemini Digital Computer, ou On-Board Computer (OBC). Ce calculateur utilisé pour guider et manœuvrer la capsule n’utilise pas encore de circuits intégrés mais est conçu à partir de composants électroniques de base.

Réalisé par IBM, le Gemini Digital Computer est capable d’exécuter une addition – ou n’importe quelle autre instruction – en 140 µs, sauf la multiplication (MLT) qui prend 420 µs et la division (DIV) qui prend 840 µs. Ce calculateur travaille en série (bit après bit), ce qui explique la faible vitesse des calculs effectués (7000 opérations par seconde tout de même). L’unité arithmétique est par ailleurs limitée à des calculs à virgule fixe, un choix qui réduit la précision des calculs mais permet également de simplifier la conception, et donc le volume, le poids et la consommation d’énergie du calculateur. Le Gemini Digital Computer entier ne pèse ainsi que 27 kg environ, une prouesse pour l’époque…
(1966) Saturn IB & Saturn V : LVDC
Le Launch Vehicle Digital Computer (LVDC) est le petit nom donné à l’ordinateur de bord chargé de piloter les fusées Saturn IVB et Saturn V, de la phase de lancement à leur insertion en orbite terrestre ou à l’injection du CSM (Command/Service Module du programme Apollo) sur une trajectoire lunaire, selon le cas. Fabriqué par IBM, le LVDS se compose de trois circuits logiques redondants avec un système de « vote » : chaque circuit logique est découpé en sept étages, et le résultat « majoritaire » de chaque étage est ensuite passé à l’étage suivant de chaque circuit logique. Ce système permet d’écarter un calculateur défectueux de la chaine de décision. IBM estime ainsi que le LVDC atteint une fiabilité de 99,6% sur 250 heures en situation opérationnelle.

Bien que les calculateurs tournent à une fréquence de base de 2048 kHz, les instructions sont exécutées en « cycles » d’environ 82 µs. Le calculateur, qui travaille en série, est donc capable d’exécuter près de 12000 instructions par seconde (soit 0,012 MIPS). Presque toutes les instructions sont exécutées en un seul cycle mis à part quelques-unes comme la multiplication et la division (exécutée en un cycle, mais le résultat n’est disponible que huit cycles plus tard). L’instruction la plus lente (MPH, multiplie deux nombres de 24-bit et conserve le résultat sur 26-bit dans le registre Product-Quotient) demande cinq cycles, soit 400 µs environ.
Chaque calculateur possède deux unités arithmétiques travaillant avec des entiers uniquement : la première exécute les additions, soustractions et les opérations logiques, la seconde se charge des multiplications et des divisions. Les deux unités sont en outre capables de travailler de manière simultanée.
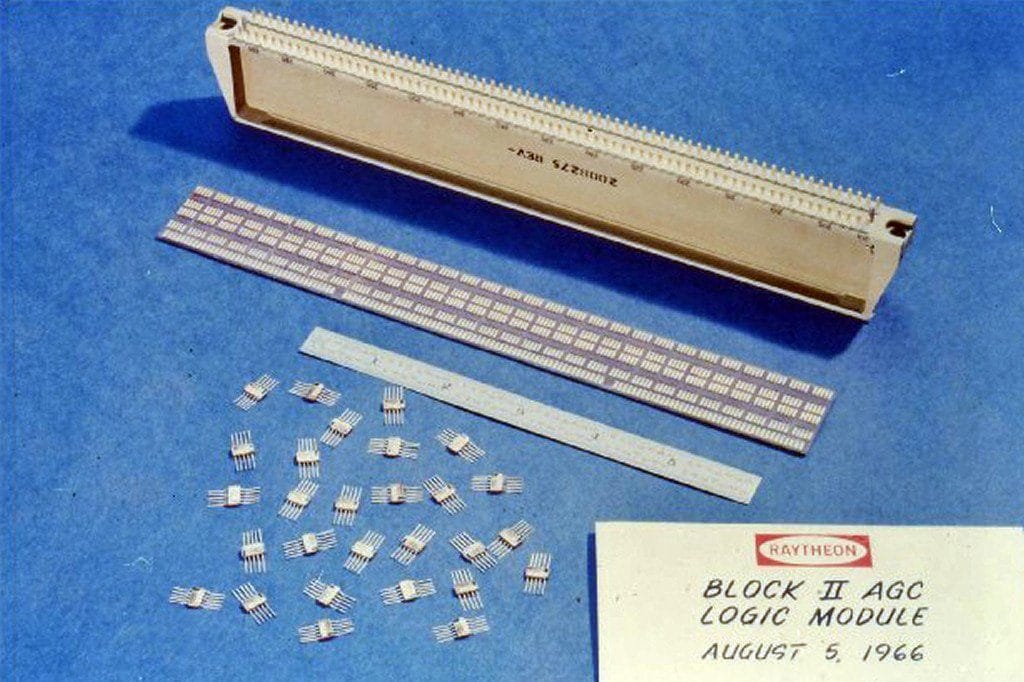
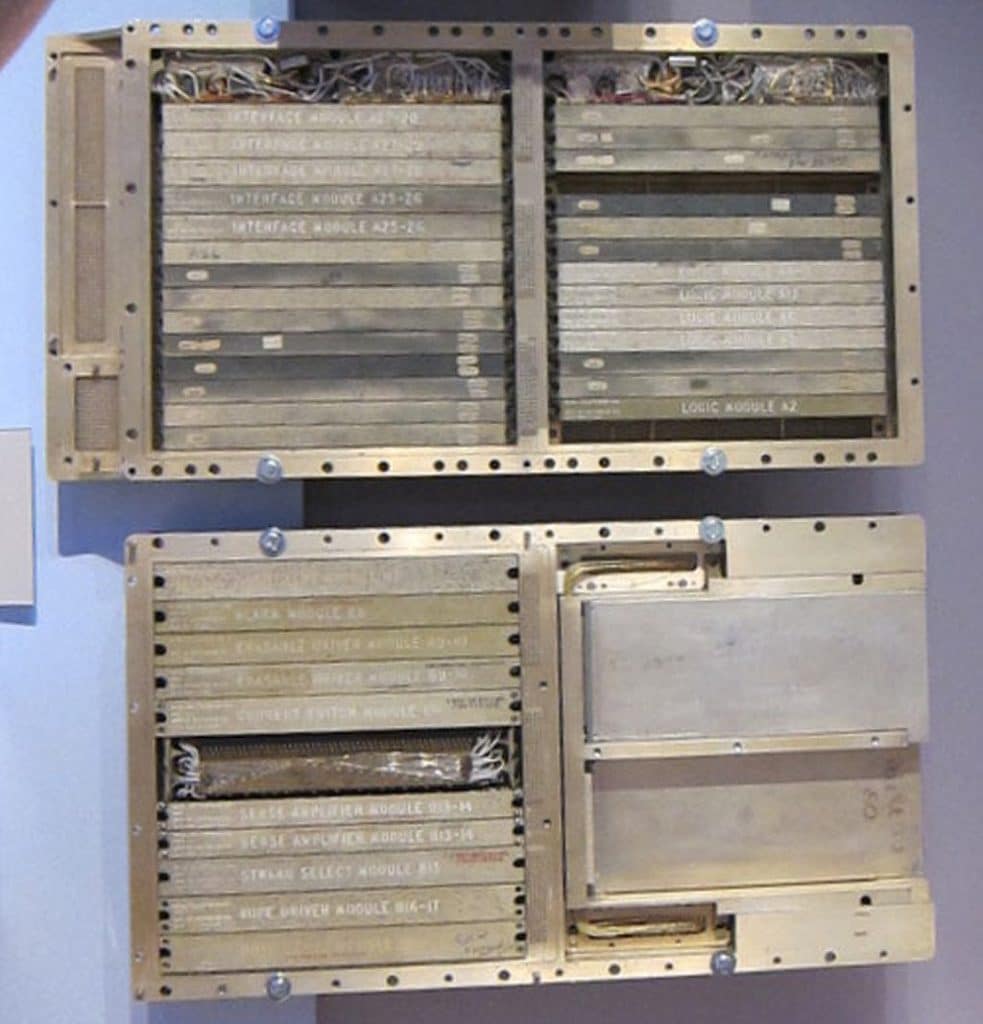
(1969) Apollo : AGC + AGS
Lors de la conception du module de commande (CM) et du module lunaire (LEM, « Lunar Excursion Module ») du programme Apollo, la NASA a exigé que les ordinateurs des deux modules soient identiques. Ces deux AGC (Apollo Guidance Computer) forment le Primary Guidance, Navigation, and Control System (PGNCS).
En cas de panne de l’ordinateur du module de commande, c’est le contrôle au sol qui est chargé de guider manuellement la capsule. Si le contact au sol est perdu, l’AGC du module de commande est capable de prendre seul en charge le retour vers la Terre. L’AGC du LEM a quant à lui la charge du guidage et de la navigation lors de l’alunissage, du re-décollage et du retour vers le CM en orbite lunaire. En cas de panne de cet AGC et donc d’annulation de l’alunissage, un second ordinateur, baptisé Abort Guidance System (AGS), doit se charger du retour vers le CM.
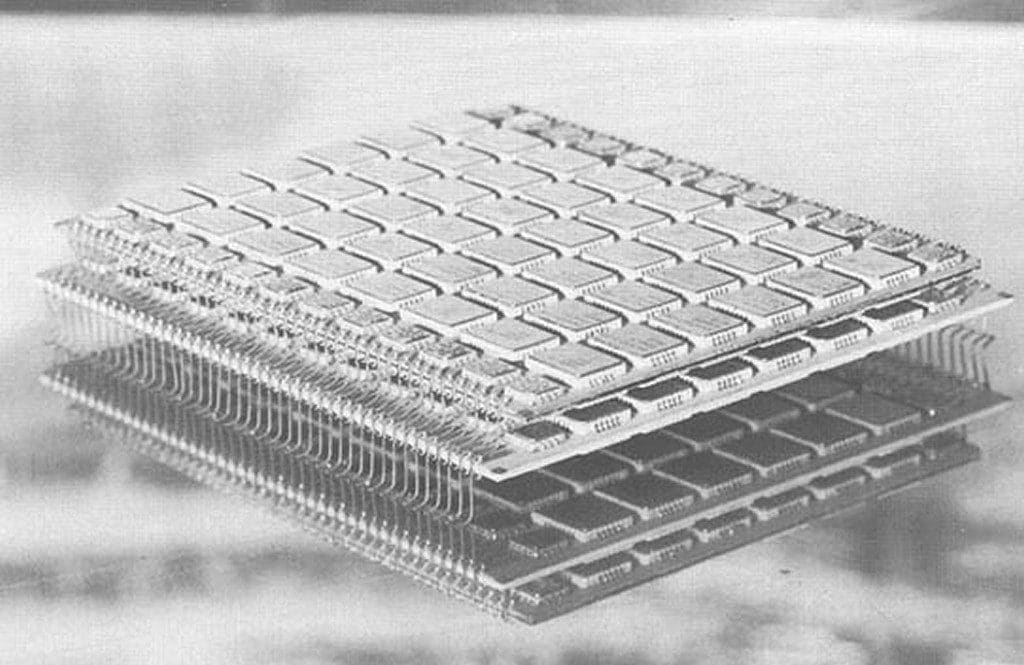
C’est le Massachusetts Institute of Technology (MIT) qui a été chargé de la conception et de la fabrication des AGC. C’est la première fois que des circuits intégrés sont utilisés dans l’espace, bien que leur fiabilité n’ait pas encore été prouvée. La version « Block II » du calculateur d’un AGC utilise des composants RTL (Resistor-Transistor Logic) fabriqués par Fairchild Semiconductor. Plus exactement, près de 5000 circuits de type DCTL (direct-coupled transistor logic) utilisés comme portes NOR (NON-OU) à trois entrées composent le calculateur. La fabrication de masse des circuits intégrés vient alors tout juste d’être lancée : à lui tout seul, le programme Apollo absorbe 60 % de la production mondiale…
Le calculateur de l’AGC possède quatre registres principaux 16-bit (A, Z, Q et LP) ainsi que plusieurs autres registres utilisés de manière interne, un bus de lecture 16-bit et un bus d’écriture 16-bit. L’AGC « Block II » est capable d’exécuter 34 instructions différentes. Une addition est réalisée en 23,4 µs alors qu’il faut 46,8 µs pour effectuer une multiplication.
L’AGS a quant a lui été conçu par le fabricant TRW. Le calculateur lui-même, baptisé Abort Electronic Assembly (AEA), est un MARCO 4418. Il est globalement plus lent qu’un AGC (le temps d’exécution d’une instruction varie entre 10 et 104 µs), mais certaines opérations sont en pratique réalisées plus rapidement. Il travaille avec des données à virgule fixe, possède un bus de données parallèle et une unité arithmétique 18-bit, et comprend 27 instructions. Pour la petite anecdote, l’AGS devait à l’origine s’appeler Backup Guidance System, mais son acronyme (BUGS) n’a pas fait l’unanimité…
(1973) Skylab : IBM TC-1
L’ordinateur de Skylab, la première station spatiale de la NASA, est basé sur la célèbre famille d’ordinateurs IBM System/360. Dans les années 1960, le fabricant met au point le System/4 Pi, une famille d’ordinateurs dérivés du System/360 mais résistant aux radiations afin de pouvoir être utilisé dans les bombardiers de l’USAF.
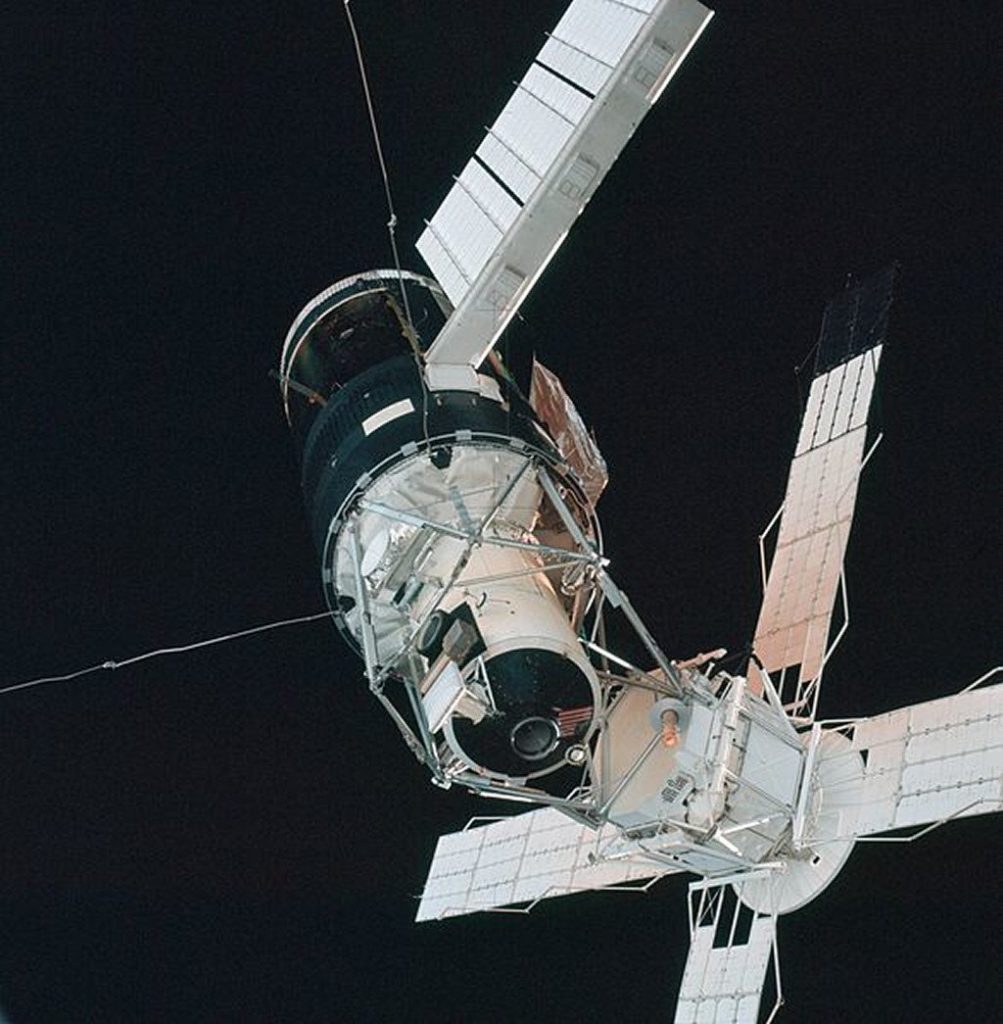
Le General Purpose Computer de Skylab, baptisé TC-1, fait partie de la famille System/4 Pi. Son processeur est de type 16-bit. Skylab utilise un système redondant avec deux processeurs reliés à une unique interface I/O. A un instant donné, seul un processeur est alimenté : en cas de basculement d’un processeur à l’autre, l’ordinateur sait exactement où reprendre l’exécution des instructions grâce à un registre spécial 64-bit commun aux deux circuits.
(1975) Viking : TTL 18-bits + Honeywell HDC 402
Lancées en 1975, les sondes Viking se composent d’un orbiteur (fabriqué par le JPL) et d’un atterrisseur (conçu par Martin Marietta), avec chacun leur propre ordinateur (Command Computer Subsystem pour le premier et Guidance, Control, and Sequencing Computer pour le second).
Le CCS reprend le principe de redondance de Skylab avec la présence de deux processeurs, mais il est possible de les utiliser de trois façons différentes : de manière individuelle (chaque processeur exécutant des instructions différentes), de manière parallèle (chaque processeur exécutant les mêmes instructions) ou en tandem (chaque processeur exécutant les mêmes données, mais avec un système de vote). Les processeurs TTL (Transistor-Transistor Logic) travaillent en série (ce qui réduit leur complexité, au détriment de leur vitesse) avec des mots de 18-bit et possèdent 13 registres principaux. Le temps d’exécution moyen d’une des 64 instructions disponibles est de 88 µs, ce qui représente 11 000 instructions par seconde environ (0,011 MIPS).
De son côté, le GCSC est constitué de deux calculateurs redondants Honeywell HDC 402 de 24-bit. Chaque instruction est exécutée en un temps moyen de 4,34 µs (soit près de 0,23 MIPS), avec un total de 47 instructions utilisables.
(1977) Voyager 1 & Voyager 2
Fabriquées par le JPL, Les sondes Voyager utilisent trois ordinateurs redondants différents, chacun en charge d’une partie des systèmes de la sonde. Le CSS (Command and Control Subsystem), similaire à celui des sondes Viking, se charge du contrôle des sous-systèmes de la sonde spatiale. Un deuxième ordinateur (le Flight Data Subsystem) s’occupe de la télémétrie et de la transmission, tandis que le troisième (l’Attitude and Articulation Control Subsystem) est dédié au contrôle d’attitude de la sonde et à la gestion de la plateforme.

Baptisé HYPACE (pour Hybrid Programmable Attitude Control Electronics), le processeur de l’AACS reprend comme base celui du CSS mais y ajoute des composants TTL un peu plus élaborés capables d’opérations en parallèles sur 4-bit. En conséquence, déplacer un mot de 18-bit ne prend plus que cinq cycles (contre 18 pour un calculateur série). Le processeur du FDS est quant à lui de conception originale avec un total de 128 registres. Fonctionnant en série, il atteint une puissance de calcul de 80 000 instructions par seconde (0,08 MIPS).
(1981) Space Shuttle : TTL + 8086, TTL + 80386
La navette spatiale américaine utilise un total de cinq ordinateurs redondants AP-1 d’IBM, basés sur l’architecture System/4 Pi du constructeur, elle-même dérivée de la famille d’ordinateurs System/360. Quatre ordinateurs fonctionnent de manière simultanée avec un système de vote, le cinquième étant présent en tant que backup. L’affichage des informations et des données dans le cockpit est confié à un Intel 8086, remplacé plus tard par un 80386.

L’AP-1 est conçu à partir de composants TTL (Transistor-Transistor Logic) de type MSI (Medium-Scale Integration, c’est-à-dire des centaines de portes logiques par composant) et LSI (Large-Scale Integration, soit des milliers de portes logiques par composant TTL). L’AP-1 est capable de réaliser des opérations en virgule fixe avec des mots de 16-bit et 32-bit, et à virgule flottante en 32-bit, 40-bit et 64-bit (uniquement des additions et soustractions dans ce dernier cas). Trois groupes de registres sont disponibles : deux groupes de 8 registres de 32-bit pour les opérations arithmétiques à virgule fixe, et un groupe de huit registres 32-bit pour les opérations à virgule flottante. Le calculateur comprend 154 instructions différentes et affiche une puissance de 0,48 MIPS et de 0,325 MFLOPS. Le MTBF de l’AP-1 atteint 5200 heures.
Au milieu des années 1990, une version plus rapide de l’AP-1 a été intégrée aux navettes en utilisation. L’AP-101S est plus compact (il n’utilise plus qu’un seul boîtier au lieu des deux de l’AP-1 d’origine), plus rapide (1,2 MIPS environ) et un peu plus fiable avec un MTBF de 6000 heures.
(1988) Bourane : 1806 + 134IP3
Bourane est la navette spatiale entièrement automatisée développée par l’ex-URSS dans les années 1980. Son ordinateur de bord est composé de quatre systèmes indépendants fonctionnant de manière redondante via un système de vote qui écarte automatiquement de la chaine de décision un ordinateur qui ne donnerait pas le même résultat que les trois autres.
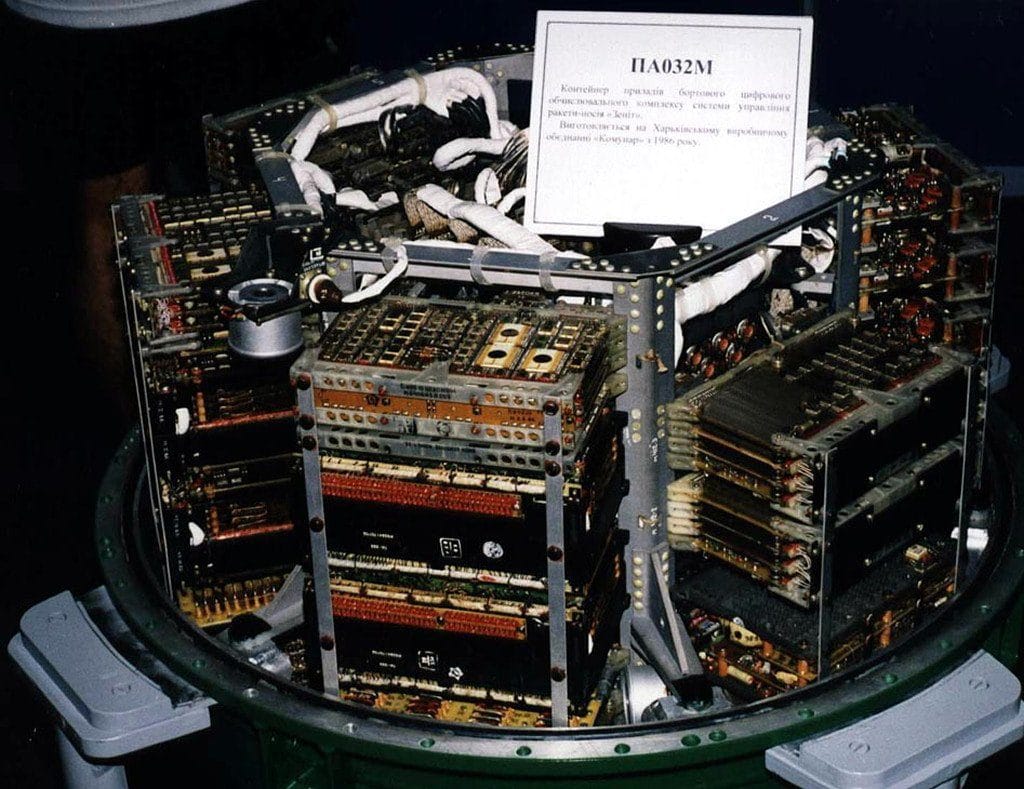
Ces ordinateurs fonctionnent grâce à un clone du DEC PDP-11 : le 1806. De type CMOS, ce processeur principal fonctionne à une fréquence de 4 MHz. Au total, 74 processeurs différents sont présents dans la navette (une majorité d’entre eux étant des ALU de type 134IP3, des clones du TTL 4-bit 54L181), la puissance de calcul atteignant au total 0,37 MIPS.
(1989) Galileo : RCA 1802 + 2901
La sonde Galileo, lancée en 1989 par la NASA et destinée à étudier la planète Jupiter, embarque un total de 19 microprocesseurs. Huit des neuf instruments scientifiques possèdent leur propre microprocesseur, le Command and Data System en utilise six, l’Attitude and Articulation Control System en possède deux et la sonde atmosphérique deux autres.
Les processeurs utilisés par le Command and Data System sont des RCA CDP1802, des puces 8-bit de type CMOS « Silicon-on-Sapphire » (plus résistant aux radiations), avec un cycle machine de 5 µs et une moyenne de 2 cycles par instruction, soit 0,2 MIPS en moyenne.
L’AACS, ou plus exactement la partie Attitude Control Electronics (ACE), utilise comme base l’ATAC (Advanced Technology Airborne Computer) du constructeur Itek, un ordinateur avec un processeur 16-bit conçu à partir de quatre ALU 4-bit Am2901 d’AMD. Capable de réaliser des opérations en virgule flottante, l’ensemble est doté de 16 registres généraux et est équivalent à un DEC PDP-11/23. Deux processeurs 16-bits redondants sont présents dans l’ACE.
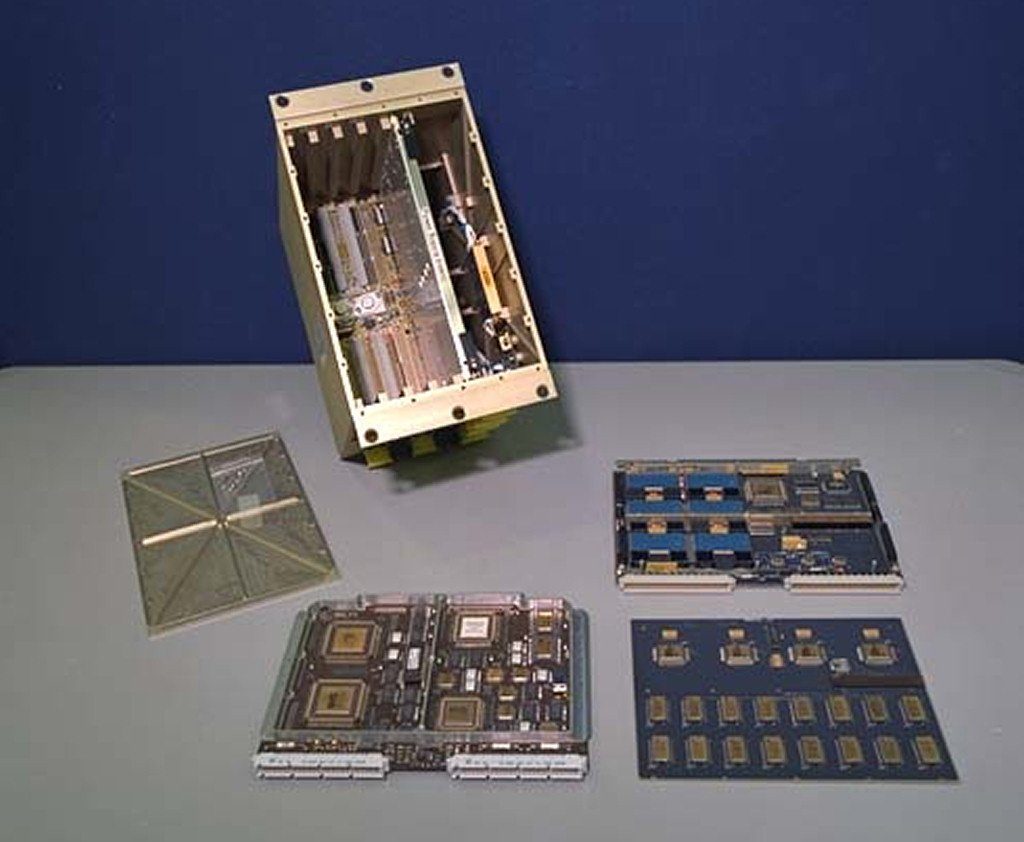
(1990) Hubble : DF-224, 80386 + 80387, 80486
Hubble embarque deux ordinateurs différents : le Flight Computer et le Science Instrument Control and Data Handling (SI C&DH). Un troisième ordinateur, le PSEA, fournit un fonctionnement de secours lorsque le DF-224 est inactif.
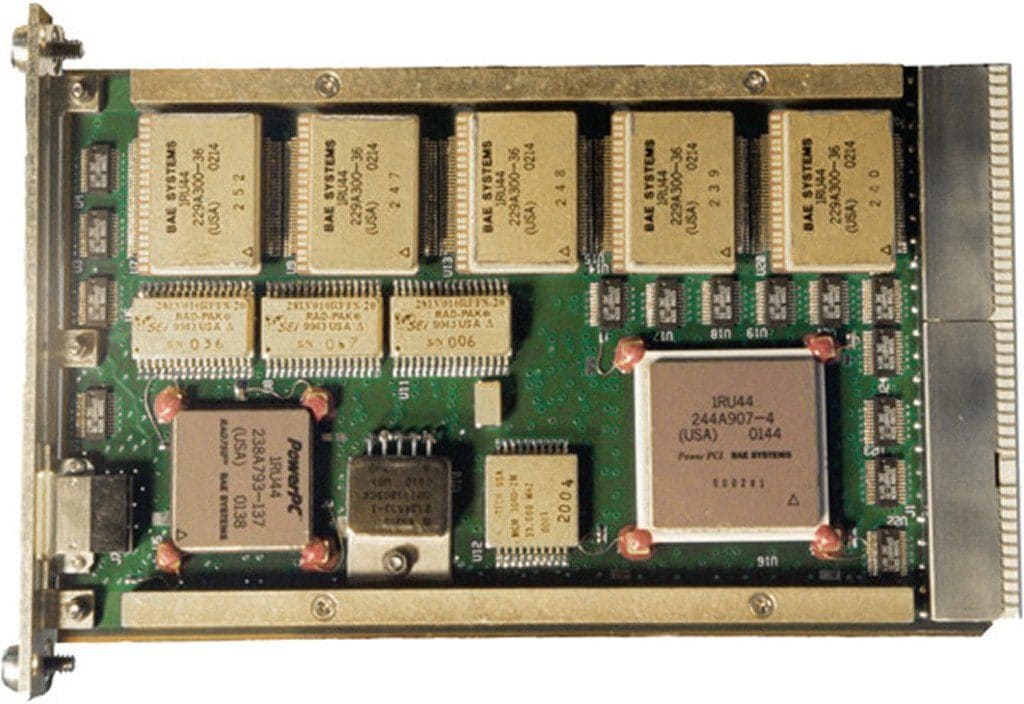
A l’origine, l’ordinateur principal est un DF-224 (voir la photo) fabriqué par Rockwell Autonetics, avec trois processeurs (dont deux de backup) à virgule fixe cadencés à 1,25 MHz. La première mission de maintenance (SM1) en 1993 ajoutera un coprocesseur – un 80386/80387 – au DF-224 afin d’augmenter sa capacité. La carte d’extension embarque deux jeux de processeurs redondants afin de parer à une éventuelle panne.
Au cours de la mission de maintenance SM3A en 1999, les DF-224 et leurs coprocesseurs sont remplacés par des i486 à 25 MHz, 20 fois plus rapide que le système de base. En 2008, le module principal a eu un problème, et c’est la « face B » de secours de la carte qui a été mise en fonction.
(1994) Clementine : 1750A + RISC 32bits
Clémentine (ou Deep Space Program Science Experiment) est une sonde lancée en 1994 destinée à tester les capteurs et les composants des engins spatiaux en cas d’exposition prolongée à l’environnement spatial, et à réaliser des observations de la Lune (en particulier de sa face cachée).

L’ordinateur de bord embarque un processeur de type MIL-STD-1750A 16-bit (1,7 MIPS) pour le contrôle d’attitude et un processeur RISC 32-bit (18 MIPS) pour le traitement d’image. Clémentine est au passage la première mission spatiale de longue durée avec un processeur RISC 32-bit à son bord.
(1996) NEAR Shoemaker : RTX2010
Lancée en 1996, NEAR Shoemaker est une sonde destinée à étudier 433 Eros, l’un des plus gros astéroïdes géocroiseurs. Arrivée en orbite en février 2000, sa mission s’est achevée en 2001 après avoir tenté et réussi un atterrissage sur la surface de l’astéroïde.

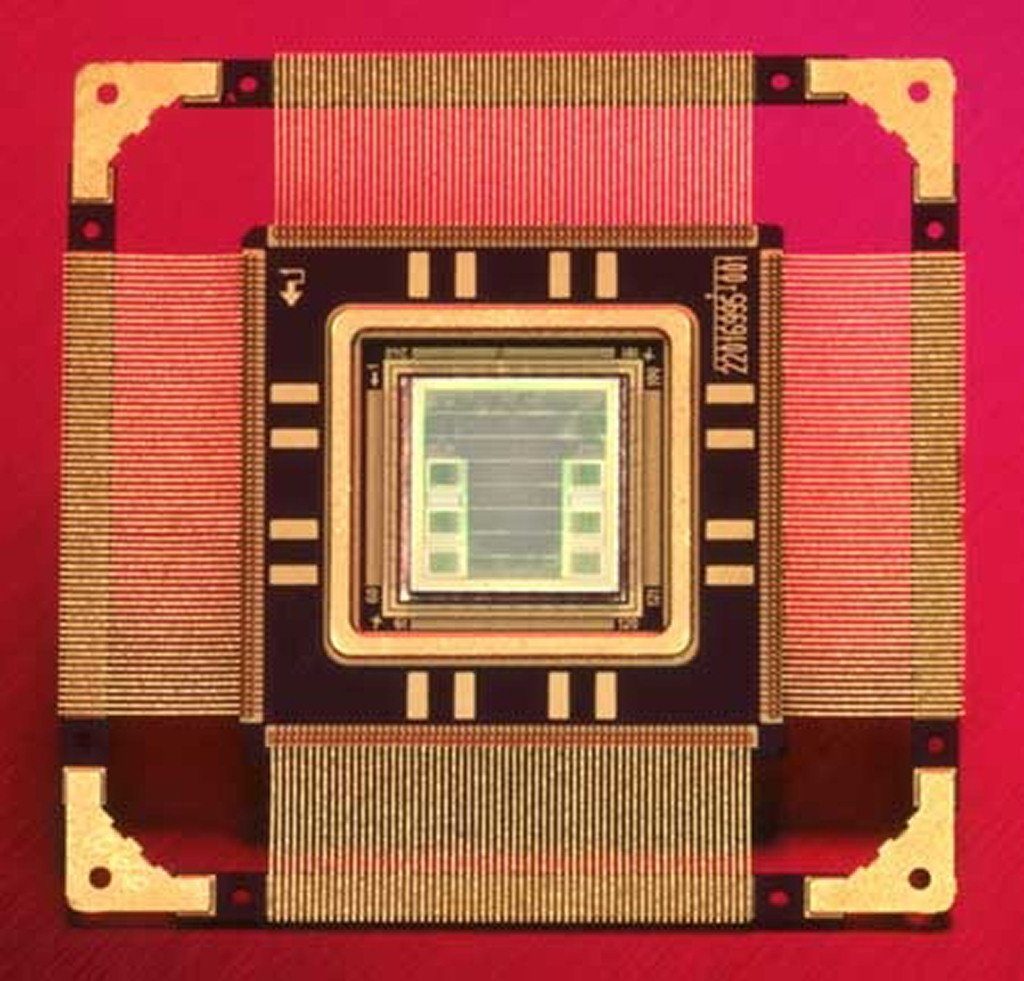
Le processeur RTX 2000 de l’ordinateur de bord, conçu par Harris Semiconductor/Intersil, est de type CMOS « Silicon-On-Sapphire » afin de lui permettre de supporter de hautes doses de radiation (en pratique jusqu’à 3000 Gy). Cadencé à 8 MHz, ce processeur 16-bit possède huit registres 16-bit et exécute n’importe quelle instruction en un à deux cycles machines de 125 ns. Il est en outre capable de réaliser des calculs à virgule fixe ou flottantes.
(1996) Pathfinder : RAD6000 + 80C85
Pathfinder est une sonde spatiale lancée en 1996 destinée à se poser sur Mars. Elle embarquait un petit rover, baptisé Sojourner, qui a exploré les alentours une fois la sonde posée.
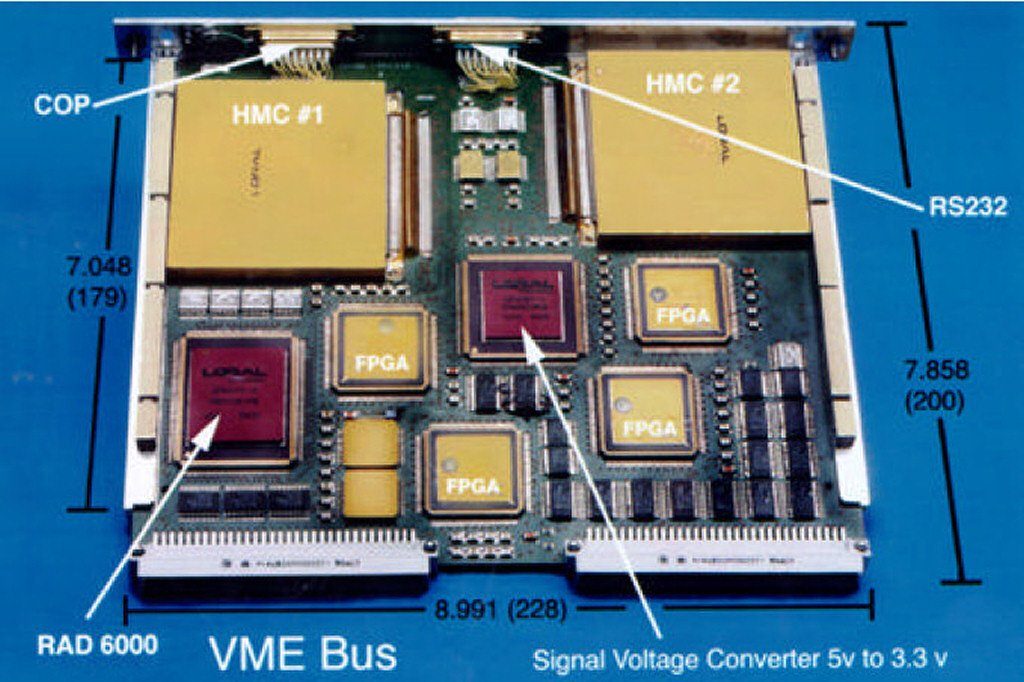
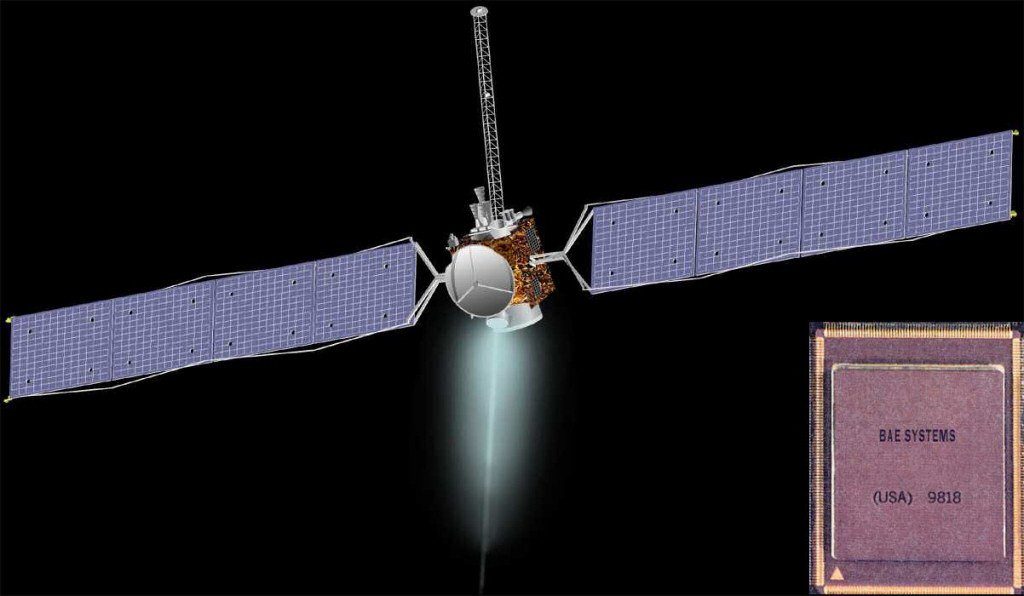
Le « cerveau » de Pathfinder est un RAD6000, une version renforcé contre les radiations du RISC (RISC Single Chip, une version simplifiée à une seule puce du POWER1 d’IBM) conçue par British Aerospace Electronics (BAE). Il s’agit d’un processeur RISC 32-bit cadencé à 20 MHz (au maximum) dans le cas de Pathfinder et doté de 8 Ko de cache interne, ainsi que d’un bus mémoire 72-bit. Il peut supporter des radiations maximale de 20000 Gy et affiche une puissance de traitement atteignant 22 MIPS. Pathfinder embarque également 128 Mo de mémoire vive et une EEPROM de 6 Mo. De son côté, Sojourner embarque une version durcie du processeur 8-bit Intel 80C85, cadencé à 2 MHz et associé à 512 Ko de mémoire vive et 176 Ko de mémoire flash.
(1996) Mars Global Surveyor : 8086 & 1750A
Mars Global Surveyor est une sonde spatiale fabriquée par Lockheed Martin, lancée en 1996 et destinée à cartographier la planète Mars, une mission qu’elle a réalisé avec succès.
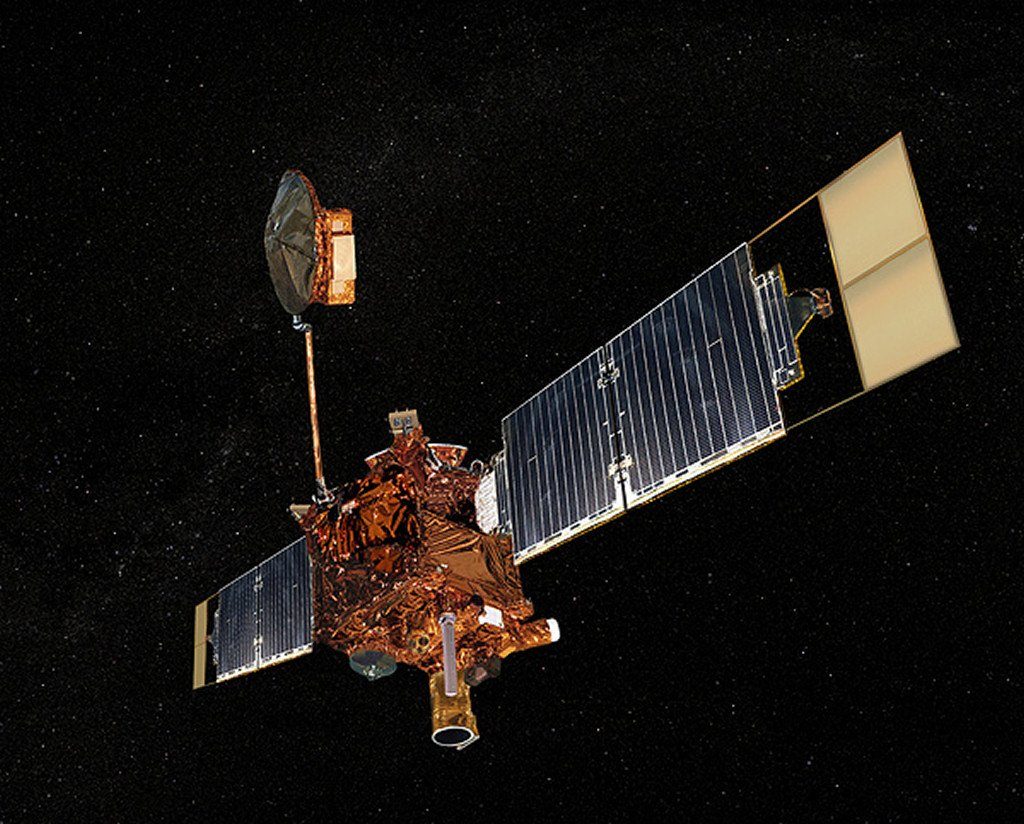
Son ordinateur de bord comprend un processeur 8086 dédié au traitement des données, et un processeur 16-bit de type MIL-STD-1750A consacré au contrôle de la sonde.
(1997) Cassini : 1750A
Dédiée à l’étude de Saturne et de ses lunes, la sonde Cassini-Huygens regroupe un orbiteur et un atterrisseur (qui s’est posé avec succès en 2005 sur la surface de la lune Titan).
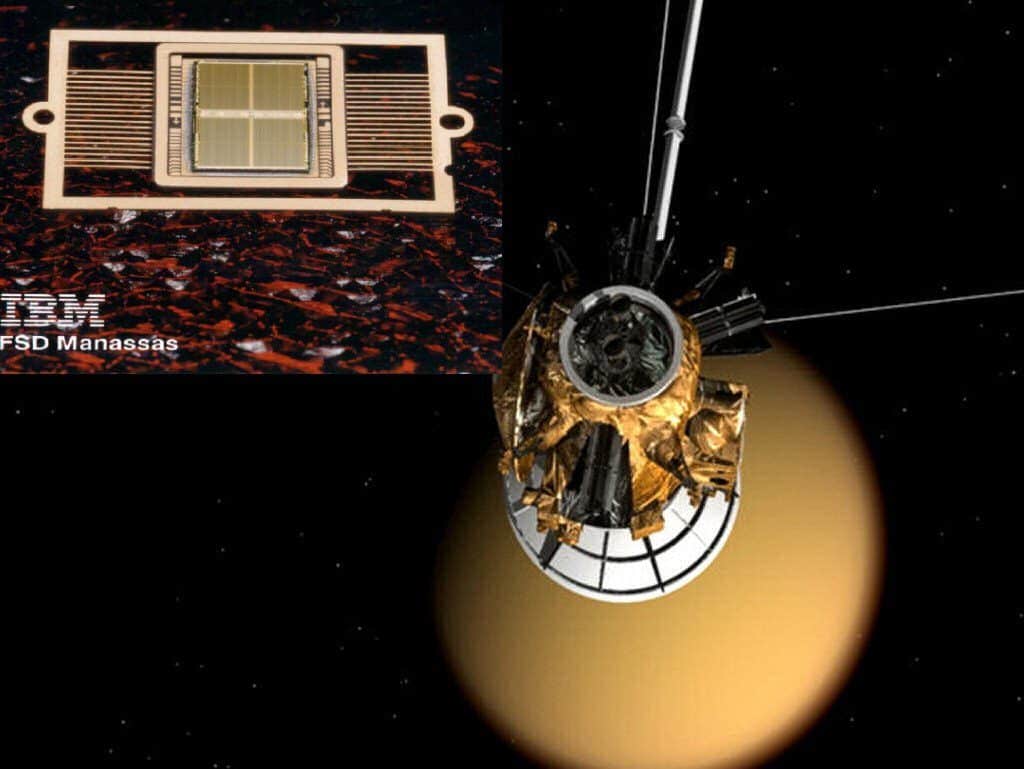
Le sous-système de commande et de gestion des données (Command and Data Subsystem – CDS) fonctionne grâce à un processeur 16-bit de type MIL-STD-1750A fabriqué par IBM. L’Attitude Control System utilise lui aussi un IBM 1750A pour fonctionner. En tout, la sonde embarque 58 microprocesseurs divers…
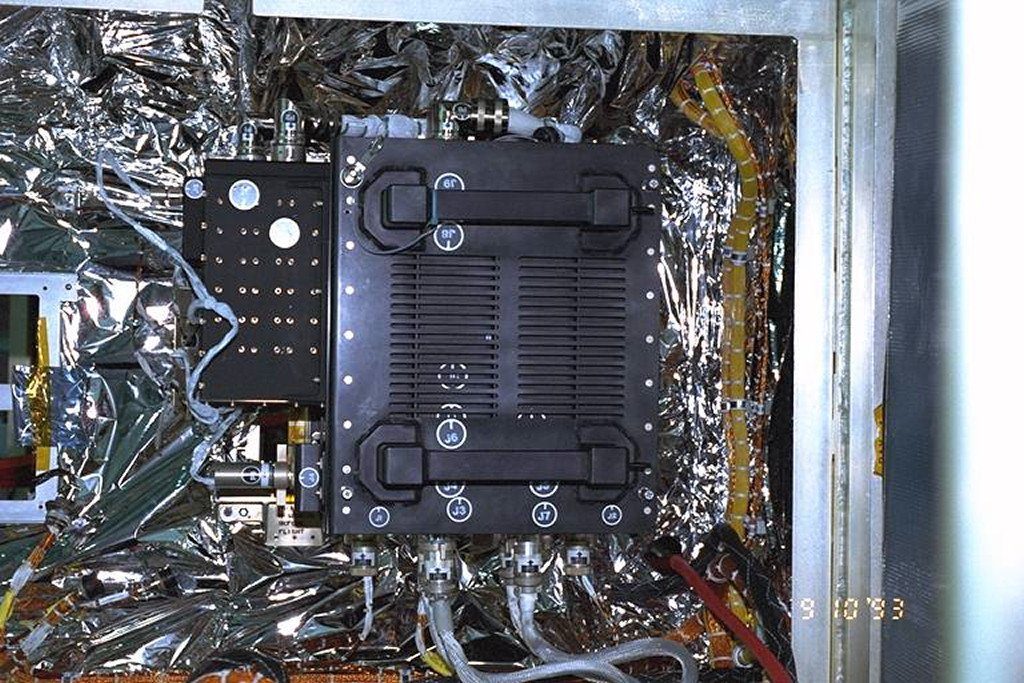
(1998) International Space Station : 80386SX-20 + 80387
La Station Spatiale Internationale (ISS) embarque un grand nombre d’ordinateurs de bord, en plus des différents ordinateurs portables (principalement des ThinkPad 755C et 760XD) utilisés par l’équipage.
La majorité des ordinateurs de la station, tel le DMS-R (Data Management System, voir photo) conçu par l’ESA pour le module russe de service Zvezda, fonctionne grâce à des processeurs i386SX-20/80387.
(1998) Mars Climate Orbiter : RAD6000
Mars Climate Orbiter est une sonde qui devait étudier la météorologie de la planète Mars, son climat et les cycles hydrologiques et du dioxyde de carbone. Hélas, une « petite » erreur d’unité de mesure a conduit à sa perte lors de la mise en orbite autour de Mars.
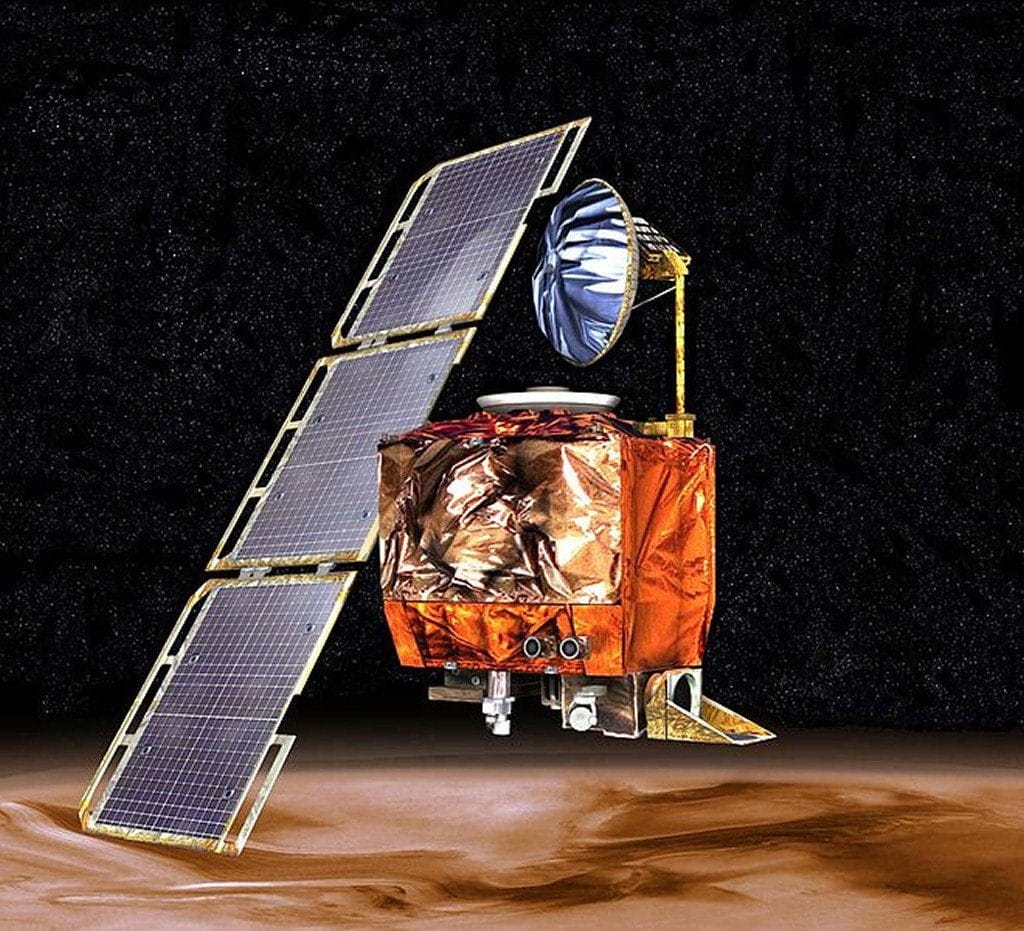
Du côté de l’ordinateur de bord, MCO utilise un processeur 32-bit RISC RAD6000 similaire à celui de Pathfinder (20 MHz maximum, 22 MIPS max).
(2000) MightySat-2.1 : RAD6000 + TMS320C40
MightySat-2.1 – également connu sous le nom de P99-1 ou Sindri – est un petit satellite mis au point par l’Air Force Research Laboratory pour tester des technologies avancées de communication et d’imagerie dans l’espace, ainsi que pour tester la résistance de certains composants au milieu spatial.

L’ordinateur de bord de MightySat-2.1 fonctionne grâce à un processeur 32-bit RAD6000 cadencé à 20 MHz (soit une puissance de 22 MIPS). On trouve également quatre processeurs TMS320C40 (des puces pouvant atteindre 30 MIPS et 60 MFLOPS dans leur version la plus puissante) permettant d’analyser les dommages causés aux composants électroniques par les radiations.
De Windows 98 à Mars 2022 : la sonde spatiale Mars Express se met à niveau
(2004) Rosetta : Harris RTX2010
Rosetta est une sonde spatiale lancée par l’ESA en 2004 qui a rejoint en 2014 la comète Tchourioumov-Guerassimenko, après les survols des astéroides (2867) Šteins en 2007 et (21) Lutèce en 2010. Elle s’est placée en orbite autour d’elle puis a envoyé un atterrisseur à sa surface, Philae. L’agence spatiale pose l’orbiteur à son tour sur la comète en 2016, signant la fin de la mission.
Le Command and Data Management Subsystem (CDMS) de l’atterrisseur utilise deux Data Processing Unit intégrant chacune un processeur Harris RTX-2010RH. Ce processeur 16-bit renforcé contre les radiations est cadencé à 10 MHz. On trouve également sur chaque DPU un processeur FPGA Actel 1280 RH gravé en 0,8µm et lui aussi renforcé contre les radiations.
(2004) Spirit & Opportunity : RAD6000
Spirit et Opportunity sont deux robots mobiles destinés à étudier la géologie de la planète Mars. Lancés en 2003, ils se sont tous les deux posés avec succès en 2004 sur la planète rouge. Prévus pour résister 90 jours sur le sol de Mars, les deux rovers se sont montrés particulièrement resistants : Spirit a survécu jusqu’en 2010 et Opportunity jusqu’en 2018.
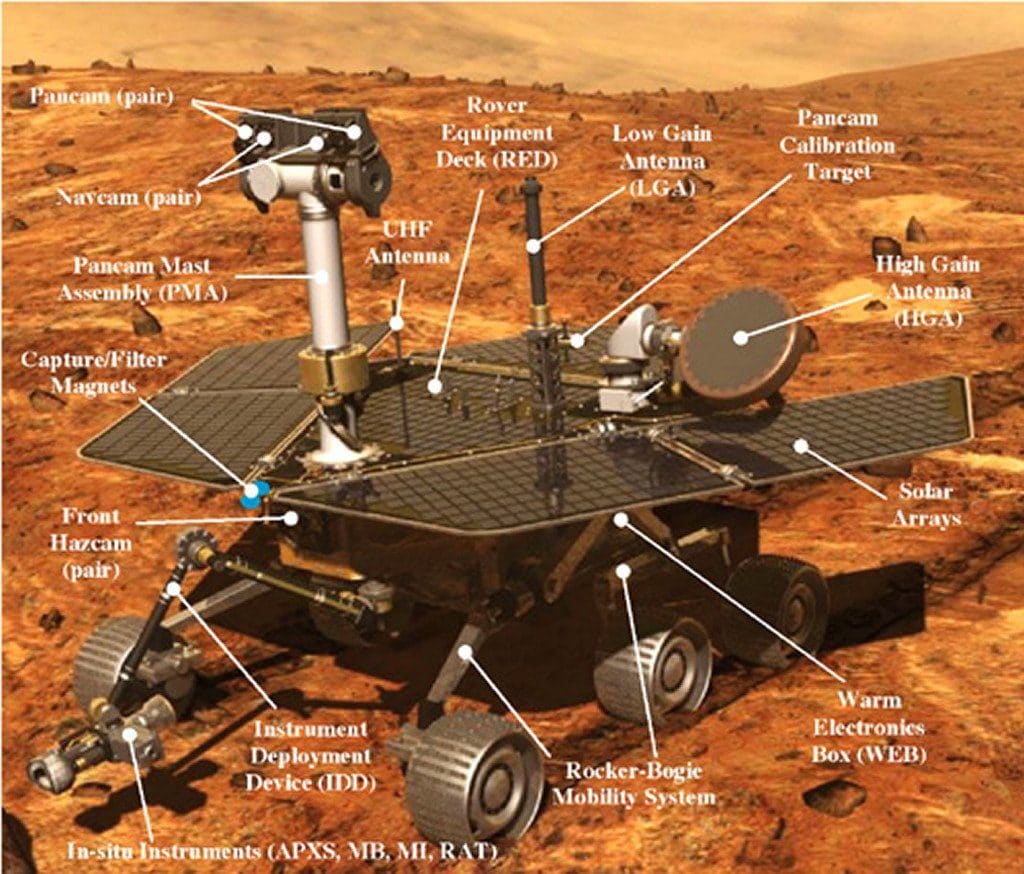
Leur « cerveau » est – encore une fois – un processeur RAD6000 cadencé à 20 MHz et affichant donc une puissance de 22 MIPS. On trouve en outre 128 Mo de mémoire vive, 256 Mo de mémoire flash et une EEPROM de 3 Mo sur chacun des robots.
(2005) Deep Impact : RAD750
Deep Impact est une sonde spatiale fabriquée par Ball Aerospace & Technologies Corp. Pour la NASA et destinée à étudier la comète Tempel 1, et plus particulièrement sa composition interne (la sonde embarque pour cela un impacteur de 370 kg). Hélas, le contact avec Deep Impact est perdu par l’agence spatiale en 2013, probablement à cause d’un bug : un compteur incrémental codé sur 32 bits a atteint le 11 août 2013 à 0 h 38 min 49 s sa valeur maximale, entrainant une réinitialisation de l’ordinateur de bord et une perte de contrôle d’attitude.
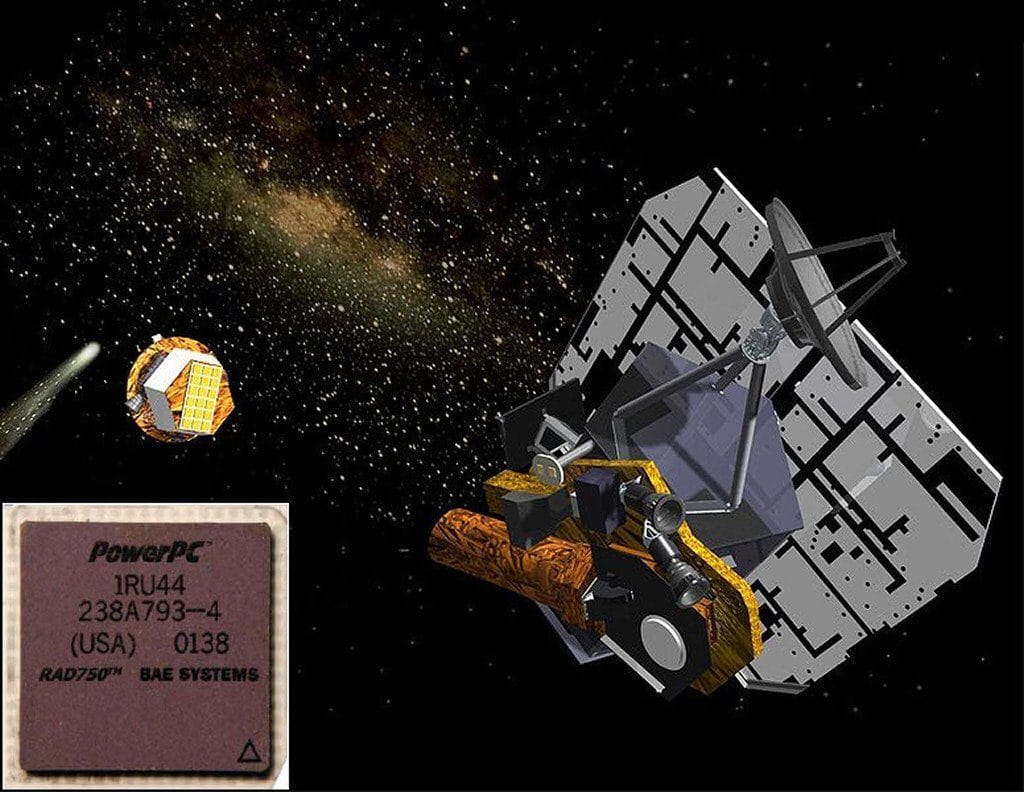
La sonde embarque deux ordinateurs redondants (Spacecraft Computing Unit – SCU) utilisant un processeur RAD750, une version durcie et résistante aux radiations du PowerPC 750 d’IBM. Cadencés à 133 MHz, les processeurs possèdent 10,4 millions de transistors chacun et peuvent supporter jusqu’à 10 000 Gy. La puissance de calcul atteint 266 MIPS environ.
(2006) New Horizons : Mongoose-V
New Horizons est une sonde spatiale destinée à étudier Pluton et Charon. Elle est passée à proximité (2,3 millions de km tout de même) de Jupiter en 2007, puis a survolé le système plutonien en 2015. Elle explore actuellement la ceinture de Kuiper, survolant (486958) Arrokoth en 2019, avec une fin de mission programmée pour 2025-2030.
Son ordinateur de bord fonctionne grâce à un processeur 32-bit Mongoose-V, une version renforcée contre les radiations du processeur MIPS R3000. Cadencé à une fréquence comprise entre 10 et 15 MHz, le Mongoose-V possède une CPU avec un pipeline à cinq étages, une FPU (MIPS R3010) avec un pipeline à cinq étages également, 32 registres généraux, 2 Ko de cache « Datas », 4 Ko de cache « Instruction ». Ce processeur est en outre fabriqué avec une technologie de type CMOS SOI.
(2007) DAWN : RAD6000
DAWN est une sonde lancée en 2007 pour étudier les deux astéroïdes Vesta et Cérès. Elle a débuté ses observations en 2011 en se plaçant en orbite autour de Vesta puis de Ceres. Sa mission s’est achevée en 2018.
Son ordinateur de bord utilise – une fois n’est pas coutume – un processeur RAD6000, cadencé cette fois-ci à 33 MHz, pour une puissance atteignant 35 MIPS. Un ordinateur de secours est également présent en cas de dysfonctionnement de l’ordinateur principal.
(2009) : LRO (Lunar Reconnaissance Orbiter) – RAD750
Lunar Reconnaissance Orbiter – LRO pour les intimes – est un orbiteur lancé en 2009 par la NASA, avec pour objectif l’étude de la Lune, en particulier la détection de la présence d’eau. Sa mission a été plusieurs fois prolongée, et la sonde est à l’heure actuelle toujours en service, même si le carburant commence à s’épuiser.
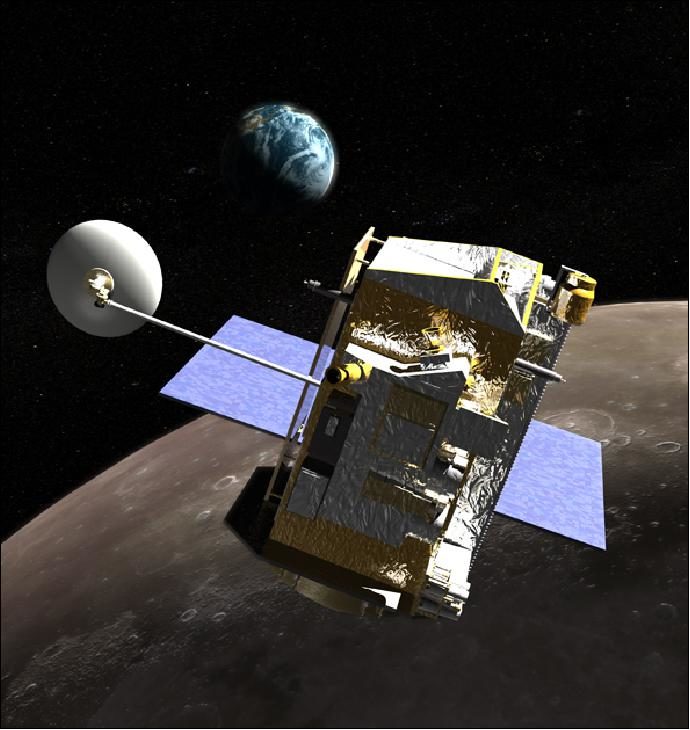
Cette sonde spatiale de presque 2 tonnes embarque un ordinateur de type SBC (Single Board Computer), avec à son bord un processeur RAD750 cadencé à 132 MHz, 36 Mo de mémoire SRAM durcie contre les radiations et une EEPROM de 4 Mo. Les données utiles sont de côté stockées dans une mémoire de masse de 400 Gb (soit 50 Go).
(2011) Curiosity : RAD750
Comme la sonde Deep Impact, le rover Curiosity – lancé en 2011 et qui est arrivé sur Mars en 2012 – utilise un processeur BAE RAD750 pour son ordinateur de bord. Il est toujours actif à la surface de la planète, la mission initiale de 2 ans ayant été prolongée indéfiniment par la NASA.
Version renforcée contre les radiations du PowerPC 750 d’IBM, le RAD750 est ici cadencé à 200 MHz et atteint donc une puissance de 400 MIPS. Dans le cas présent, le processeur est accompagné par 256 Mo de mémoire vive, 2 Go de mémoire flash et une EEPROM de 256 Ko. Un ordinateur de secours identique est présent en cas de dysfonctionnement du premier. Suite à un problème identifié pendant la mission, les ingénieurs en charge du rover ont d’ailleurs basculé le rover de l’ordinateur principal vers celui de secours en 2015.
(2011) Juno : RAD750
Lancée en 2011, la sonde Juno est destinée à l’étude de la planète Jupiter autour de laquelle elle s’est mise en orbite en 2016. La mission est prévue pour durer jusqu’en 2025.
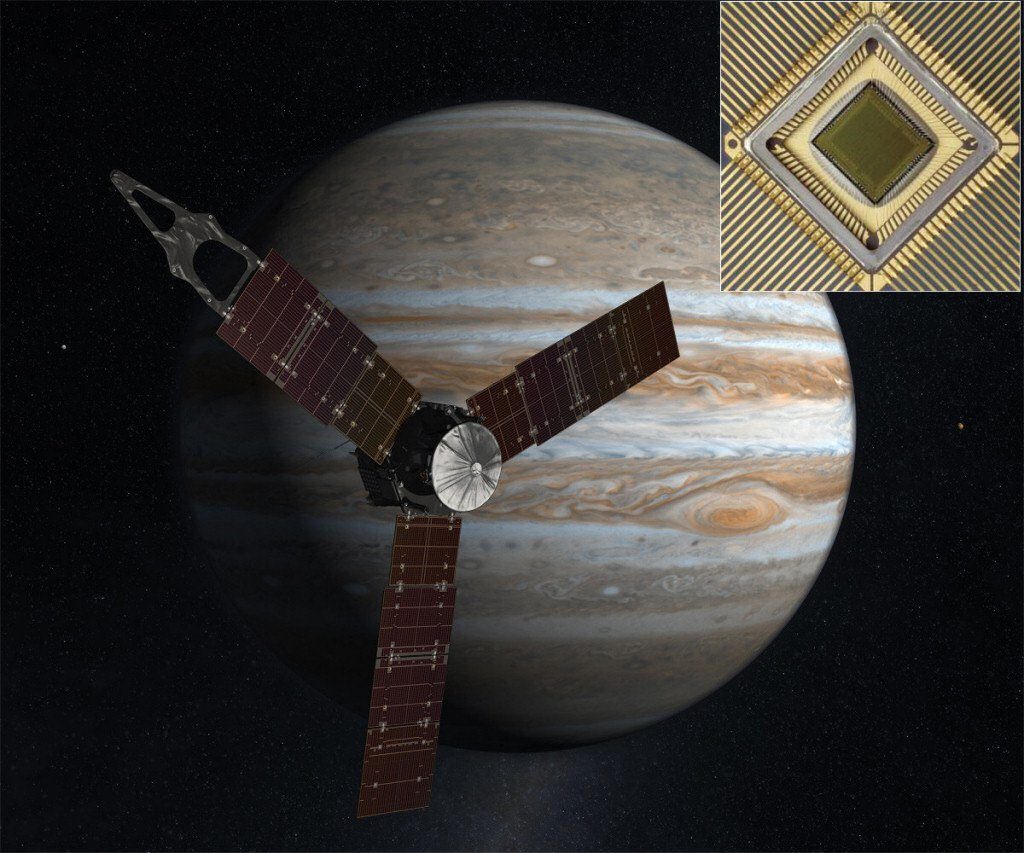
Juno utilise elle aussi un processeur RAD750 dans son ordinateur de bord. En plus de son traitement spécifique antiradiations, le processeur bénéficie également d’un véritable bouclier antiradiations protégeant l’ensemble de l’électronique de la sonde.
(2014) : Hayabusa 2 – HIREC HR5000S (MIPS64)
La sonde japonaise Hayabusa 2 a permis d’étudier l’astéroïde Ryugu – choisi en raison de la possibilité qu’il contienne des matériaux organiques – en ramenant sur Terre grâce à une petite capsule éjectable des échantillons prélevés en 2019 à sa surface. Hayabusa 2 est depuis 2020 en mission étendue, avec pour objectif l’étude de l’astéroïde 1998 KY26 en 2031.
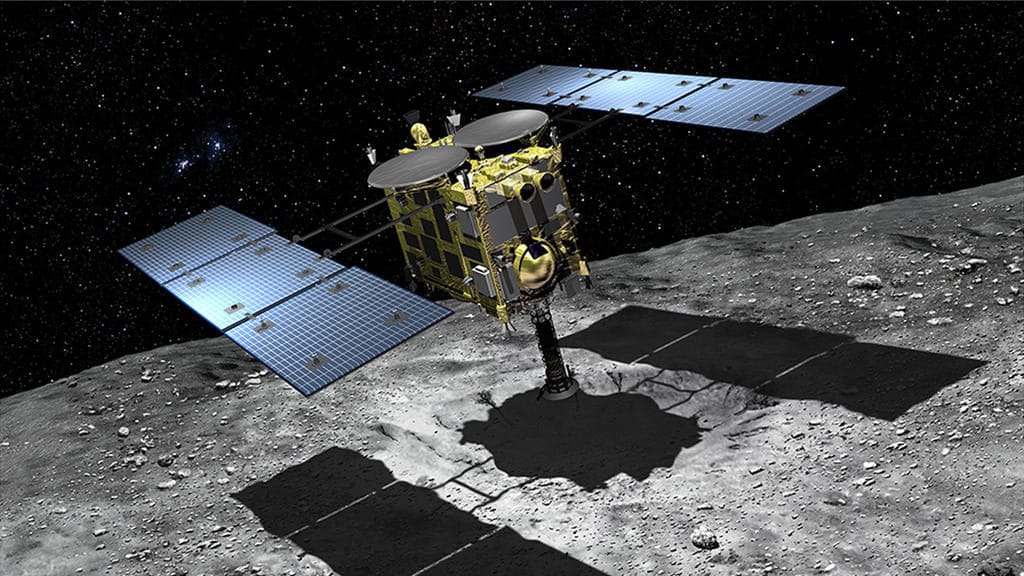
Le contrôle d’attitude et d’orbite est géré par un processeur HIREC HR5000S, un CPU d’architecture MIPS 64-bit cadencé à 200 MHz mais ne consommant que 4 à 6 watts. Hayabusa 2 embarque également un petit atterrisseur, MASCOT, géré par deux ordinateurs redondants basés sur un SoC Aeroflex GR712RC (architecture LEON3FT) cadencé à 40 MHz, pour une puissance minimale de 10 MFLOPS. La mémoire de stockage flash NAND propose une capacité utile de 860 Mo avec l’encodage Reed-Solomon utilisé.
(2016) : Schiaparelli / ExoMars EDM – LEON-FT (SPARC-V8)
Schiaparelli – ou ExoMars EDM – est le nom donné à l’atterrisseur associé à l’orbiteur européen ExoMars Trace Gas Orbiter. Expérimental, il devait entre autres valider certaines techniques de rentrée atmosphériques et d’atterrissage.
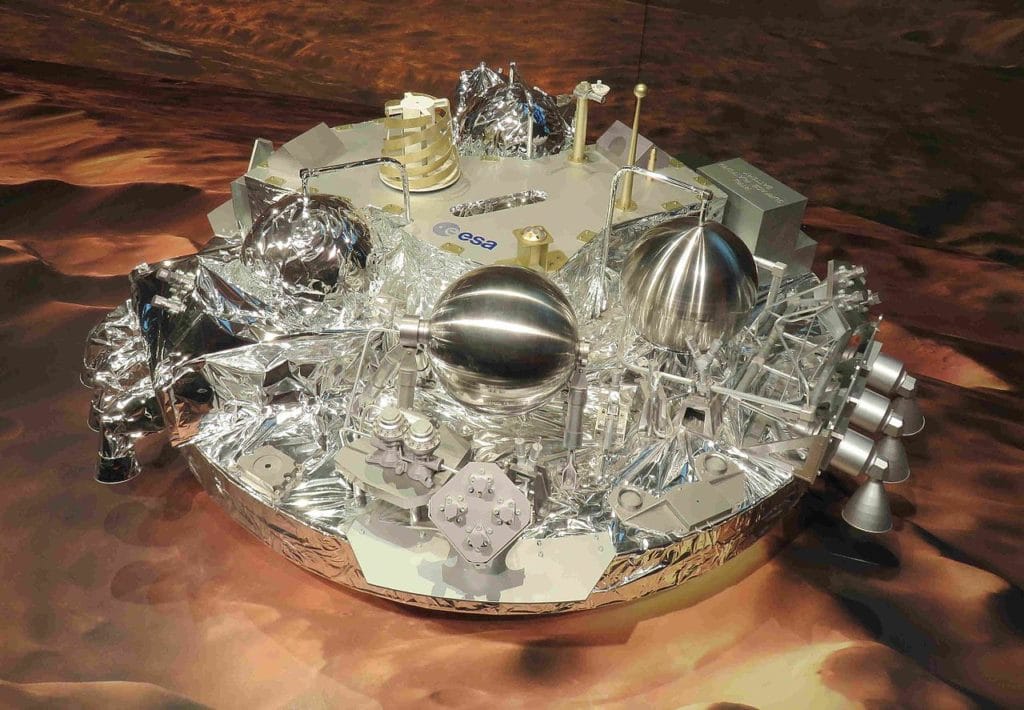
L’atterrisseur s’est hélas écrasé en raison d’une mauvaise interprétation de l’altitude de la sonde par l’ordinateur de bord, ou CTPU (Central Terminal & Power Unit). Au cœur de celui-ci, on trouve le Processor Module regroupant un processeur LEON-FT (un CPU VHDL 32-bits basé sur l’architecture SPARC-V8), la mémoire vive, et une mémoire PROM.
Spaceborne : la NASA lance un super calculateur dans l’espace
(2016) OSIRIS-REx (RAD750)
Origins-Spectral Interpretation-Resource Identification-Security-Regolith Explorer, ou OSIRIS-REx pour les intimes, est une mission spatiale destinée à étudier l’astéroïde Bénou, grâce à une sonde lancée en 2016 par la NASA. Elle a recueilli des échantillons de la surface de l’astéroïde en 2020, avant leur retour prévu pour 2023.
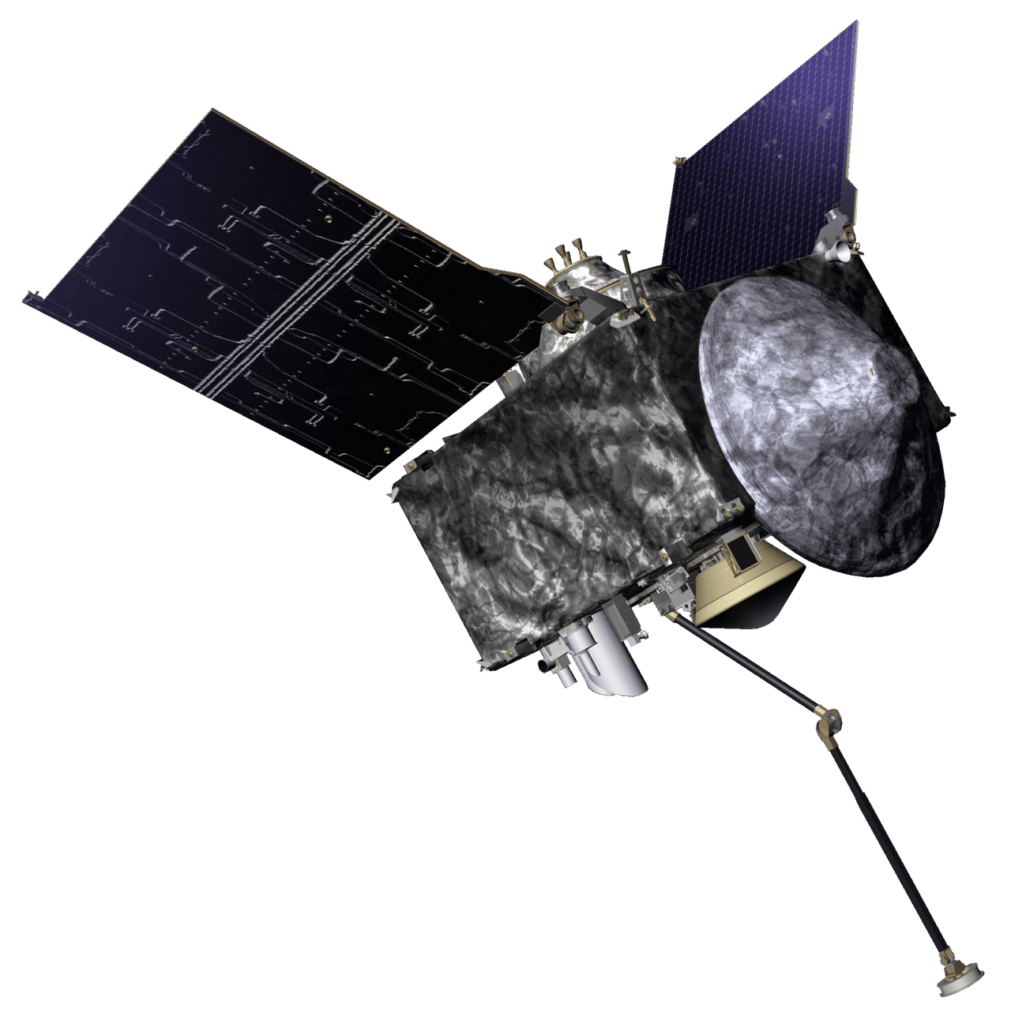
L’ordinateur de bord de la sonde affiche des caractéristiques similaires aux sondes conçues à la même époque : on retrouve donc un processeur RAD750 durci capable de résister à un rayonnement ionisant jusqu’à 10 MGy et à des températures comprises entre -55°C et 125°C. Avec ses 10,4 millions de transistors cadencés à 200 MHz, il affiche une puissance de calcul de 400 MIPS, le tout pour une consommation de 10 watts.
(2018) InSight (RAD750)
InSight est une sonde de la NASA destinée à l’étude interne de Mars grâce à un atterrisseur. Lancée en 2018, elle s’est posée la même année sur la planète rouge. La mission a été prolongée de deux ans en 2021, mais ses panneaux solaires complètement empoussiérés pourraient conduire à la fin de la mission dans les mois qui viennent, par manque d’énergie.
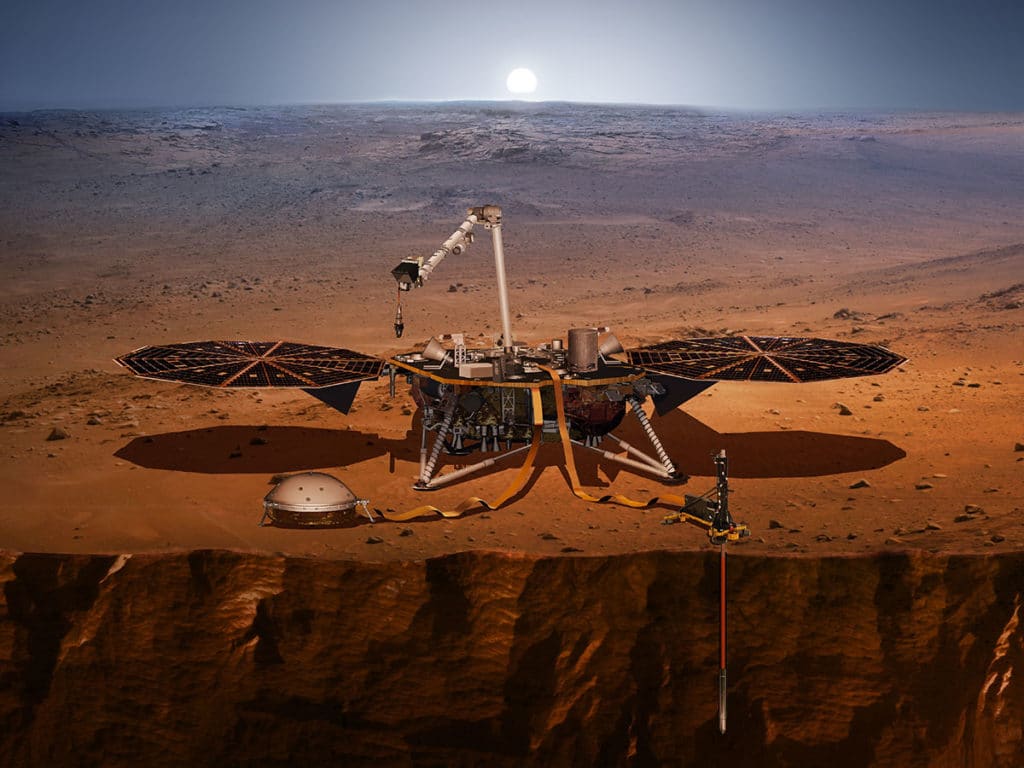
Encore une fois, c’est une plateforme (doublée pour la redondance) basée sur un processeur RAD750 qui est embarquée dans la sonde. Cadencé à 115,5 MHz, le CPU est accompagné de 64 Go mémoire flash pour le stockage des données, le tout fonctionnant sous VxWorks.
(2020) Perseverance (RAD750)
Le rover Perseverance et son petit hélicoptère Ingenuity font partie de la mission Mars 2020 de la NASA qui, comme son nom l’indique, vise à étudier la surface de la planète Mars et à collecter des échantillons du sol. Ceux-ci doivent être ramenés sur Terre grâce à une future mission. Lancée en 2020, la sonde embarquant l’astromobile a atteint son objectif en 2021 et est toujours en activité.
Deux ordinateurs identiques sont embarqués dans la sonde, mais un seul est en en fonctionnement à un moment donné, le second servant de plateforme de secours. La base est encore une fois un processeur RAD750, cadencé ici à 200 MHz. Il est accompagné par 256 Ko d’EEPROM, 256 Mo de mémoire vive et 2 Go de mémoire flash.
(2021) James-Webb (RAD750)
Le James Webb Space Telescope (ou JWST) est un télescope spatial lancé fin 2021, conçu en partenariat par l’ESA, l’ASC (l’Agence Spatiale Canadienne) et la NASA. Il est arrivé à sa destination, le point de Lagrange L2 à 1,5 millions de km de la Terre, un mois plus tard. Les premières images exceptionnelles provenant du JWST ont été publiées en 2022.
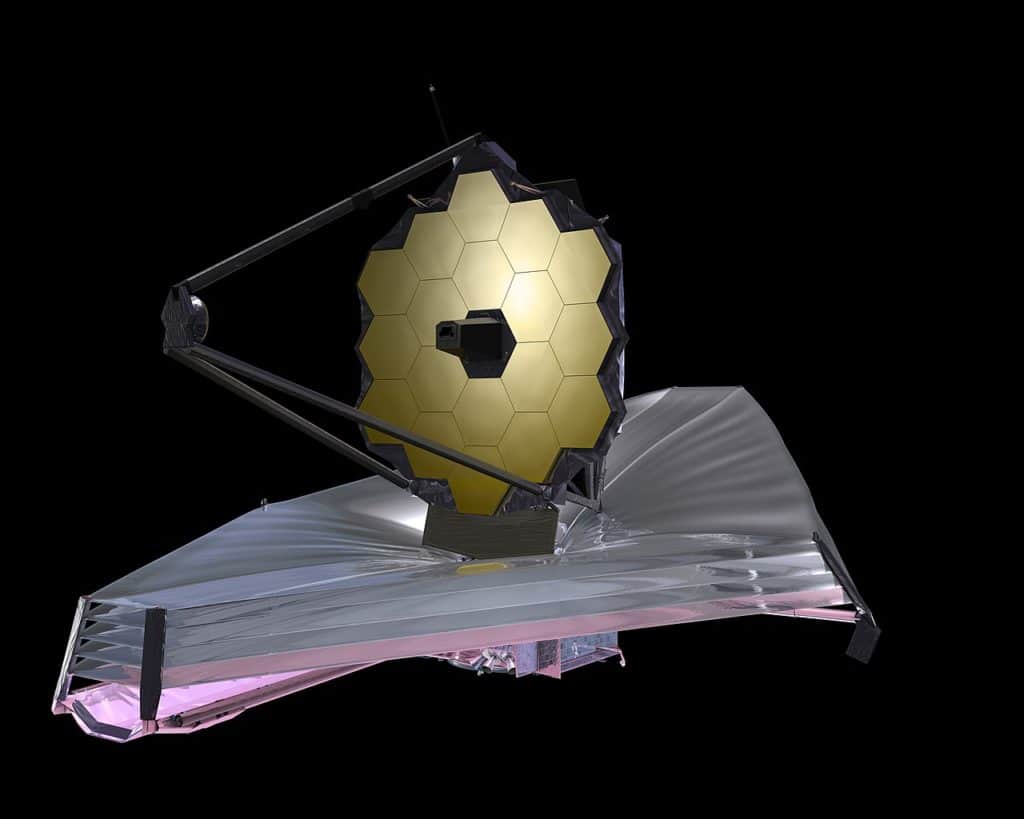
Le cerveau du télescope spatial repose sur un ordinateur embarqué, le Command Telemetry Processor (CTP), situé dans le Command and Data Handling (C&DH) System aux côtés du Solid State Recorder (SSR) dédié au stockage des données avec une capacité de 59 Go. Le processeur RAD750 cadencé à 118 MHz est accompagné de 4 Mo d’EEPROM et de 44 Mo de mémoire vive.








Article très intéressant.
Voici plusieurs décennies que l’informatique accompagne…
C’est ça de modifier 60 fois le texte avant publication 😀
Merci, c’est corrigé 😉
Tu es Yan Solo ?
Tu veux savoir si j’ai tiré en premier ?