Introduction
La mission Mars Science Laboratory de la NASA et son rover Curiosity ont été très présents dans l’actualité cet été. Dans ce dossier, nous avons donc décidé de vous parler du rover et de passer en revue quelques instruments présents sur ce dernier. Nous ne prétendons pas être exhaustifs — certains instruments ne sont pas traités — mais ce dossier devrait vous permettre de vous rendre compte de la technologie embarquée dans ce rover de 899 kg.
L’intérieur
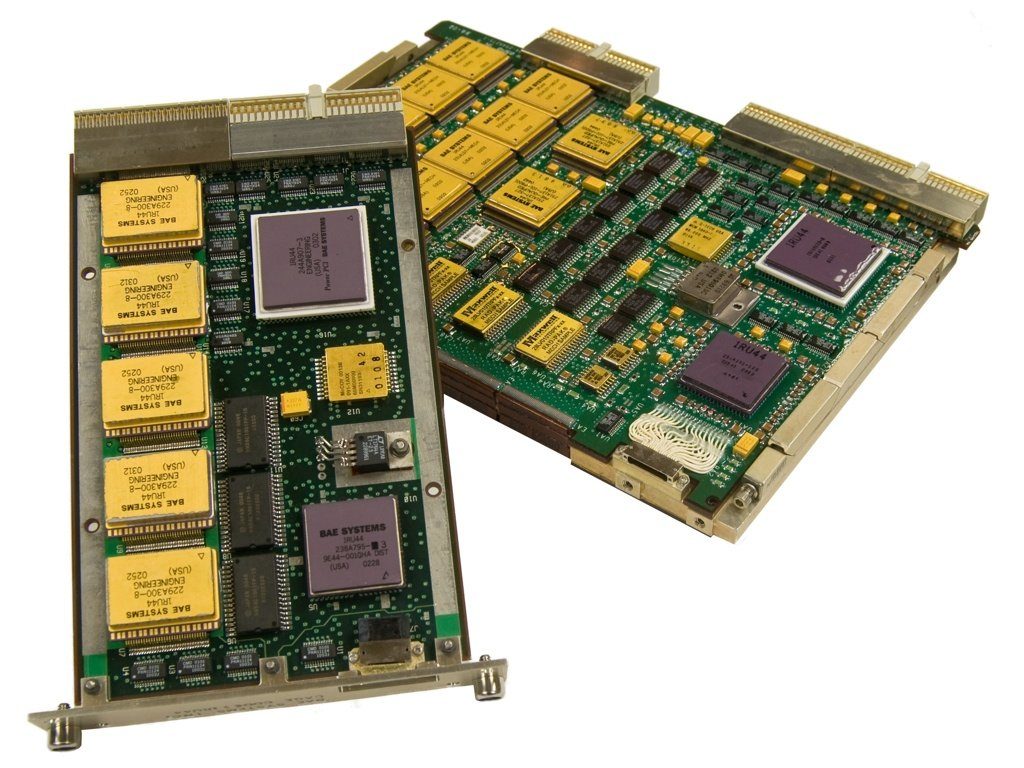
Les anciennes sondes étaient basées sur un PowerPC RAD600, Curiosity embarque un RAD750 de chez BAE. Ce processeur est dérivé du PowerPC 750 d’IBM et Motorola (renommé G3 par Apple) et est modifié pour résister aux écarts de températures (de -55 °C à 125 °C) et aux radiations martiennes (jusque 10 000 gray). Les modifications entraînent une hausse du nombre de transistors : environ 10,4 millions contre 6,3 millions sur un PowerPC 750. Gravé en 0,25µ, il fonctionne à 200 MHz et consomme 5 W. La puce en elle-même a coûtée 200 000 $ et a été produite à 150 exemplaires.
L’ordinateur de bord
Curiosity contient deux ordinateurs de bord : les RCE (Rover Compute Element). Ils sont redondants, c’est-à-dire que seul un des ordinateurs est utilisé, le second n’est présent que pour remplacer le premier en cas de panne. En plus du processeur PowerPC RAD750, on trouve 256 Mo de mémoire vive, 256 ko de mémoire morte et 2 Go de mémoire flash pour les données. Bien évidemment, tous les composants sont adaptés aux conditions martiennes et résistent aux radiations et aux basses températures.
La source d’énergie
Curiosity est alimenté par un réacteur nucléaire. Contrairement aux centrales classiques basées sur le principe de la fission, le système est ce qu’on appelle un générateur thermoélectrique à radioisotope. Le réacteur est alimenté par 4,8 kg de plutonium 238 (un isotope non fissile) et des thermocouples permettent de transformer la chaleur générée en électricité. Le réacteur est capable de fournir 125 W et des batteries lithium-ion sont présentes en cas de forte demande en énergie. Sa durée de vie annoncée est de 14 ans au minimum, mais son efficacité va diminuer avec le temps.
Les communications
Nous en avons déjà parlé, Curiosity est capable de communiquer avec la Terre. Si la liaison directe avec le rover est lente (160 bits/s ou 800 bits/s selon l’antenne utilisée), il peut envoyer des données à 256 kilobits/s vers Mars Odissey et à environ 2 mégabits/s vers Mars Orbiter. Les deux satellites en orbite autour de Mars envoient ensuite les données vers la Terre à 256 kilobits/s ou 6 mégabits/s. Bien évidemment, la liaison n’est pas permanente : il faut que Curiosity puisse voir les satellites.
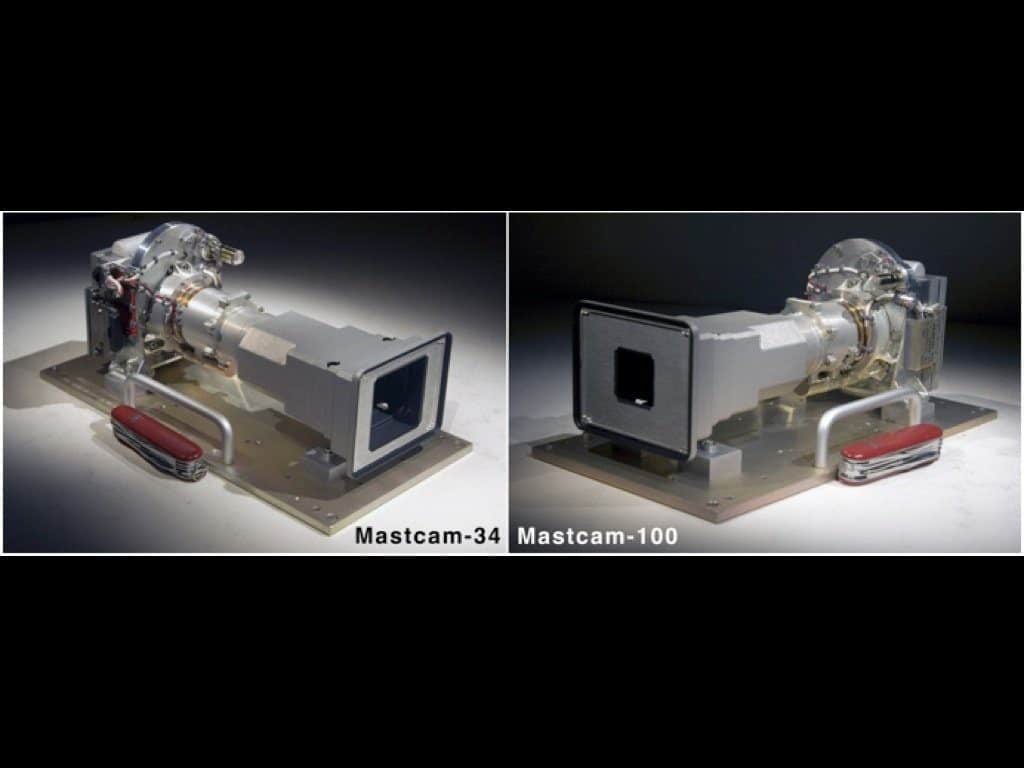
Le MastCam
Intéressons-nous maintenant aux instruments en commençant par le système MastCam. Curiosity propose en effet deux caméras montées sur un mât, une équipée d’un objectif 100 mm (équivalent 343 mm) et l’autre d’un objectif de 34 mm (équivalent 115 mm). Les deux caméras utilisent des capteurs CCD de 1 pouce avec une définition de 2 mégapixels et des images finales qui mesurent 1 200 x 1 200 pixels (environ 1,4 Mpixel). En taille, c’est assez proche de ce que les compacts experts proposent actuellement, mais la définition des appareils actuels est évidemment plus élevée. Il faut prendre en compte un point important : les choix datent de 2004 et dans un projet comme celui-là, il est évidemment exclu de modifier un composant dès qu’une version plus performante est disponible.
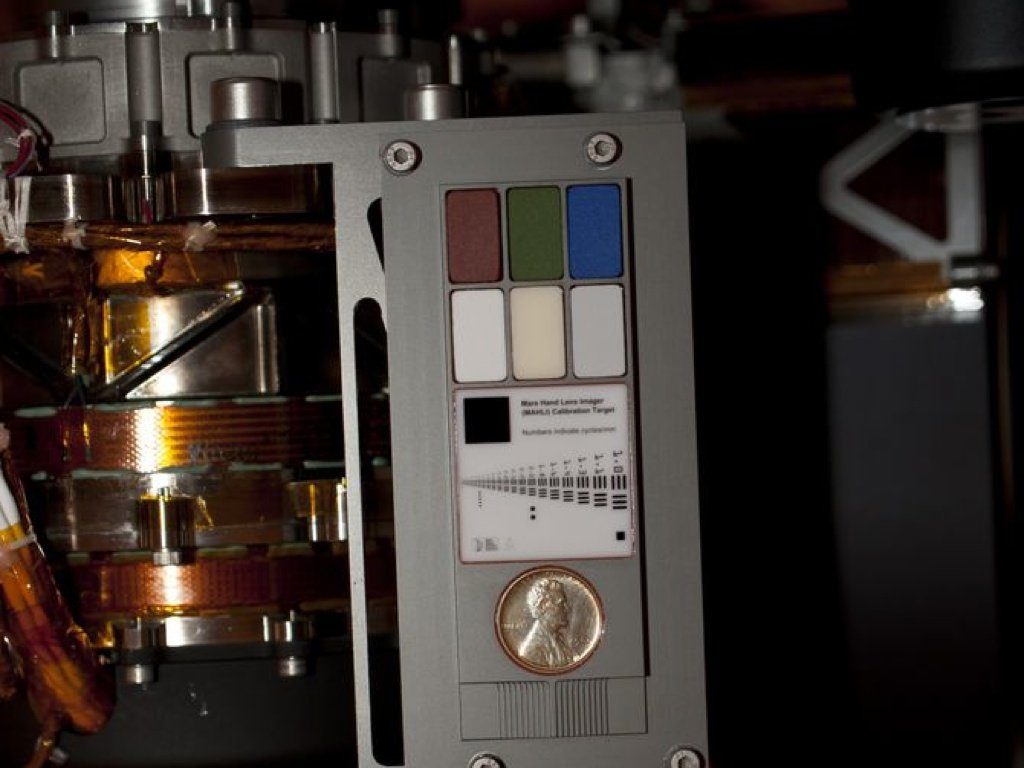
Les images
Les images en elle-même sont captées de façon intéressante : les caméras utilisent un filtre de Bayer qui permet de capter toutes les couleurs directement, contrairement aux anciennes sondes qui devaient faire plusieurs expositions en captant chaque couleur séparément. Des filtres rotatifs permettent ensuite de se concentrer sur une seule couleur ou même sur de l’infrarouge. Un autofocus permet de faire le point entre 2,1 mètres et l’infini. Enfin, une plaquette contenant notamment une pièce de monnaie sert à effectuer la balance des blancs manuellement.
Le stockage, la vidéo, etc.
Les images sont stockées en format RAW dans la mémoire interne de chaque caméra, qui est de 8 Go. Les caméras peuvent compresser les images de deux façons : une compression sans pertes et une compression en JPEG, assez classique. En plus des images de 1,4 million de pixels, des images en 150 x 150 sont récupérées directement pour envoyer des miniatures des résultats. Les caméras peuvent aussi filmer en 720p à 7 images/s. La NASA ne l’indique pas, mais le codec est a priori le MJPEG.

Le ChemCam
Le ChemCam (Chemistry and Camera complex) est un appareil français qui intègre un laser capable de transformer en plasma n’importe quelle matière pour ensuite analyser par spectrographie les différents éléments la constituant. Le laser est capable d’envoyer des impulsions d’une puissance de l’ordre de 1 million de watts pendant environ 5 milliardièmes de secondes.
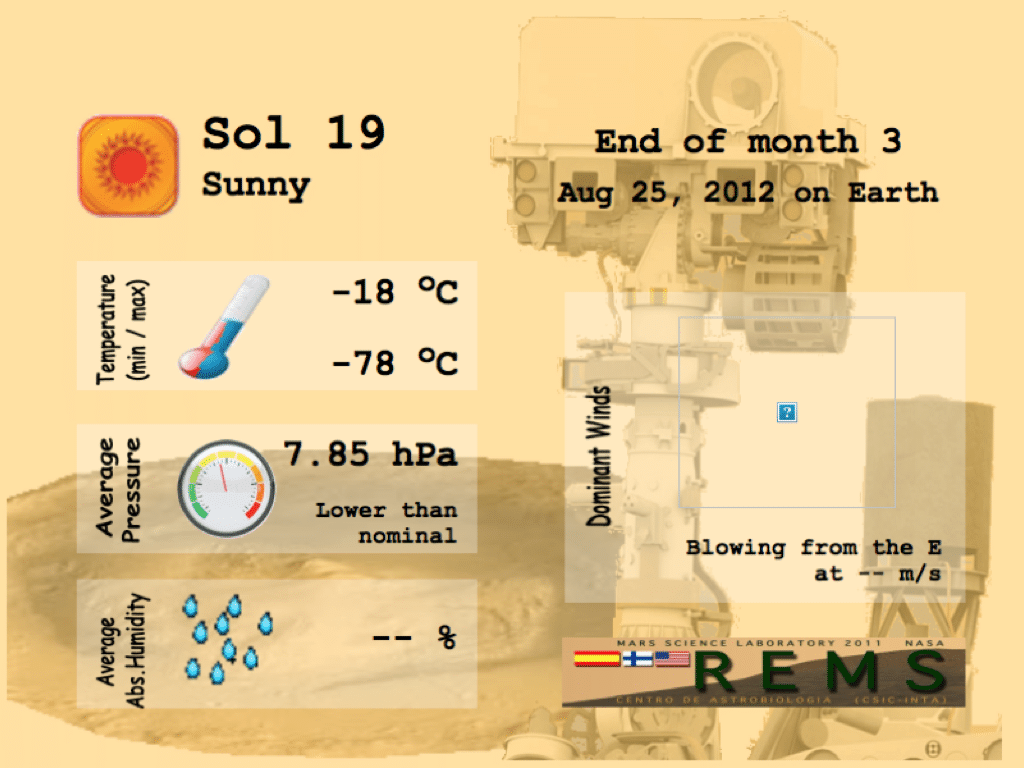
Le REMS
Le REMS (Rover Environmental Monitoring Station) est une station météo d’origine espagnole installée sur le rover. Il permet notamment de récupérer la température — qui peut atteindre 2°C dans la période chaude —, la pression atmosphérique — environ cent fois inférieure à la pression terrestre —, la vitesse et la direction du vent, etc.
Les NavCam
Pour la navigation du rover, il y a 12 caméras, installées par paires. Monochromes, elles fournissent une image de 1 024 x 1 024 pixels et sont utilisées pour gérer les déplacements de l’appareil. L’installation par paires permet de créer des images en relief pour améliorer la navigation. Une partie des caméras est montée sur un mât, les autres sont placées au niveau du sol.
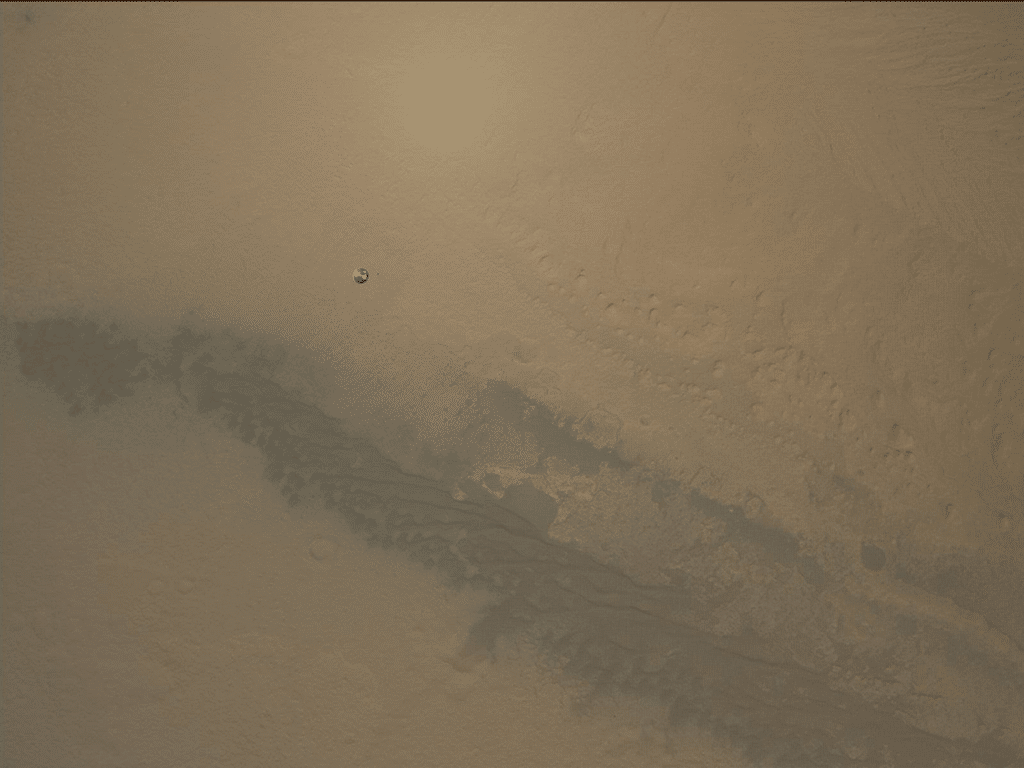
MARDI
MARDI — Mars Descent Imager — est le capteur vidéo utilisé pendant l’atterrissage. Il utilise la même technologie que les caméras MastCam et propose des images avec une définition de 2 mégapixels. Le temps d’exposition est très court : 1,3 milliseconde. Vu sa position, la caméra est donc maintenant inutilisable.
MAHLI
MAHLI (Mars Hand Lens Image) est une caméra montée sur un bras robotique et destinée aux photos « macro ». Elle est capable de prendre des photos nettes à 2,1 cm et son pouvoir de séparation est de 14 microns par pixel. Elle utilise le même capteur que les MastCam et MARDI. Elle est équipée de deux LEDs blanches pour éclairer les photos, ainsi que de diodes émettant dans l’ultraviolet pour vérifier si certains éléments sont fluorescents.

CheMin
CheMin (Chemistry and Mineralogy) est un instrument qui utilise de la diffraction aux rayons X pour déterminer la composition d’un élément. Le temps d’acquisition est élevé : il faut environ 10 heures pour obtenir un résultat probant.

Il roule
Le rover, comme son nom l’indique est motorisé. La mission est prévue pour durer au moins 687 jours terrestres et il devrait effectuer entre 5 et 20 km sur la planète rouge. La photo montre les premiers essais des roues, un succès.
La mise à jour du logiciel interne
Point intéressant, le système d’exploitation doit être mis à jour régulièrement. C’est VxWorks — un système temps réel destiné à l’embarqué — qui est utilisé, et les contraintes matérielles ont obligé la NASA à utiliser plusieurs versions du système. Il a fallu passer du logiciel v9 — destiné au vol interplanétaire — au logiciel v10 — prévu pour l’exploration — peu après l’arrivée sur Mars. Rappelons que Curiosity a quitté la Terre en novembre 2011. Entre Sol 5 et 8 (le Sol est le jour martien), le nouveau système a donc été testé et mis en place dans le rover, l’envoi du système lui-même ayant été effectué durant le vol.
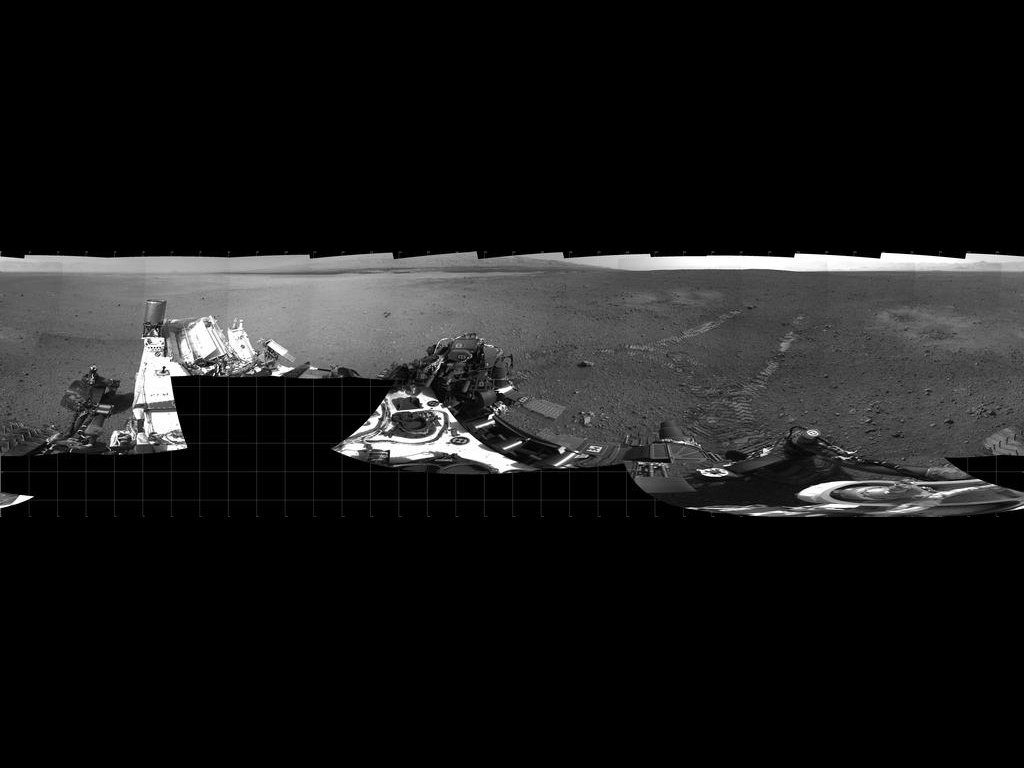
Les autres rovers
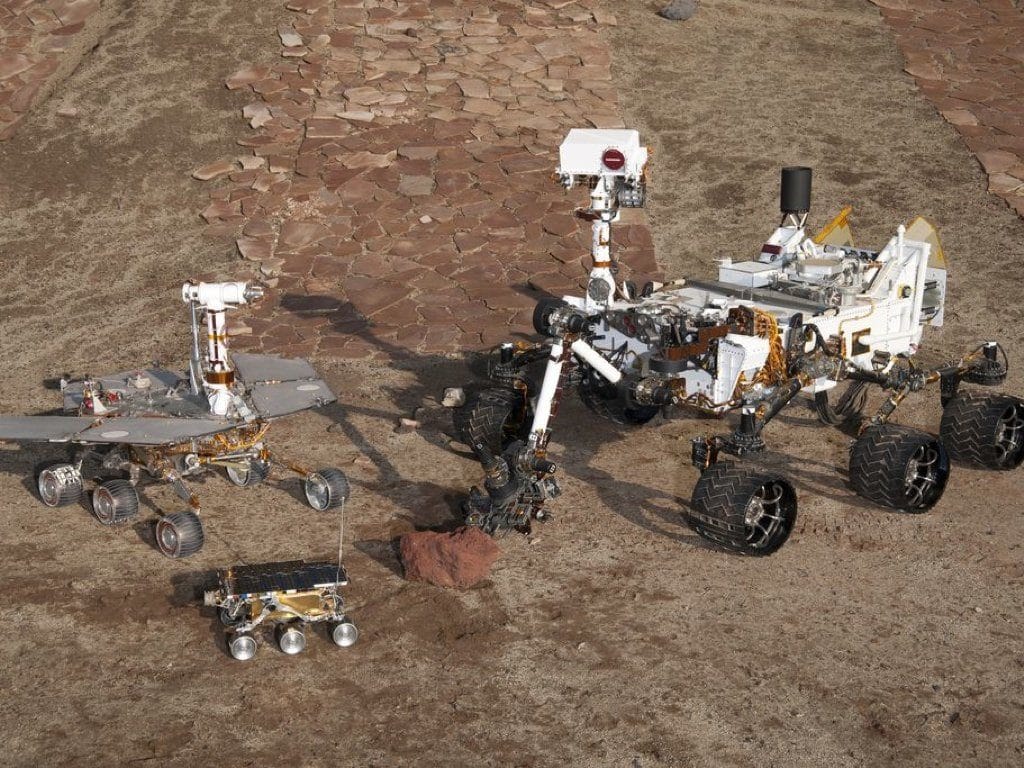
Curiosity (à droite) n’est pas le seul rover à avoir séjourné sur Mars. A l’avant-plan, on peut voir Sojourner, le rover de la mission Pathfinder de 1997 et à gauche on peut voir un rover identique aux deux modèles envoyés sur Mars en 2004, Opportunity et Spirit. Le modèle de droite, le plus gros, est donc le rover Curiosity.
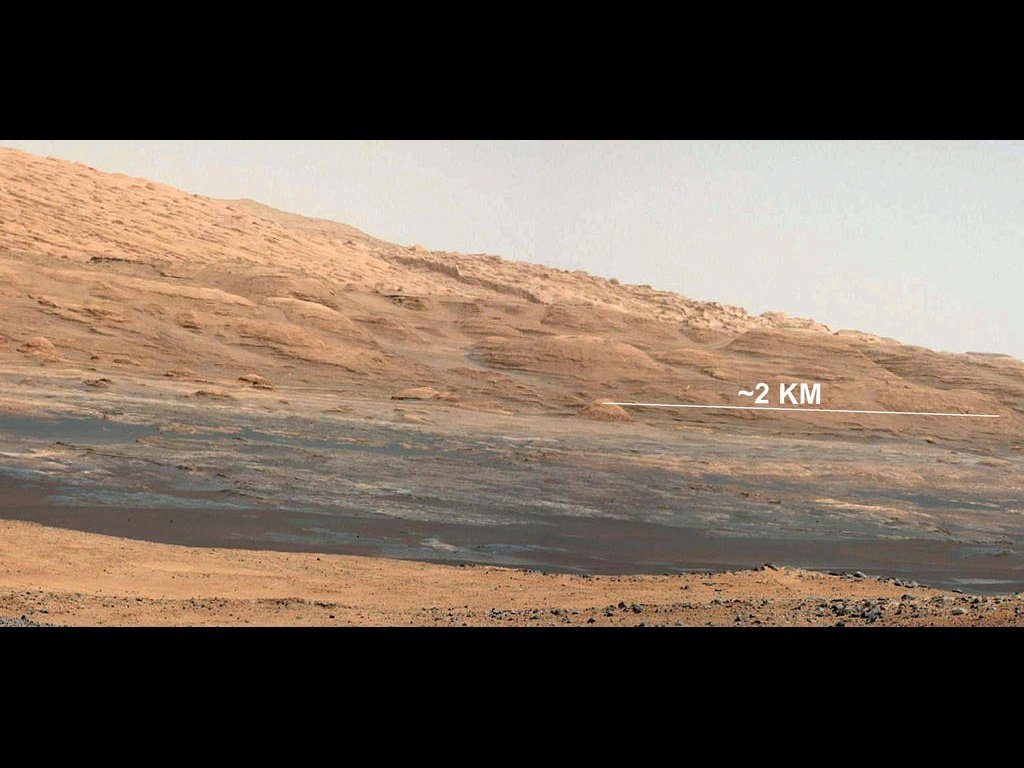
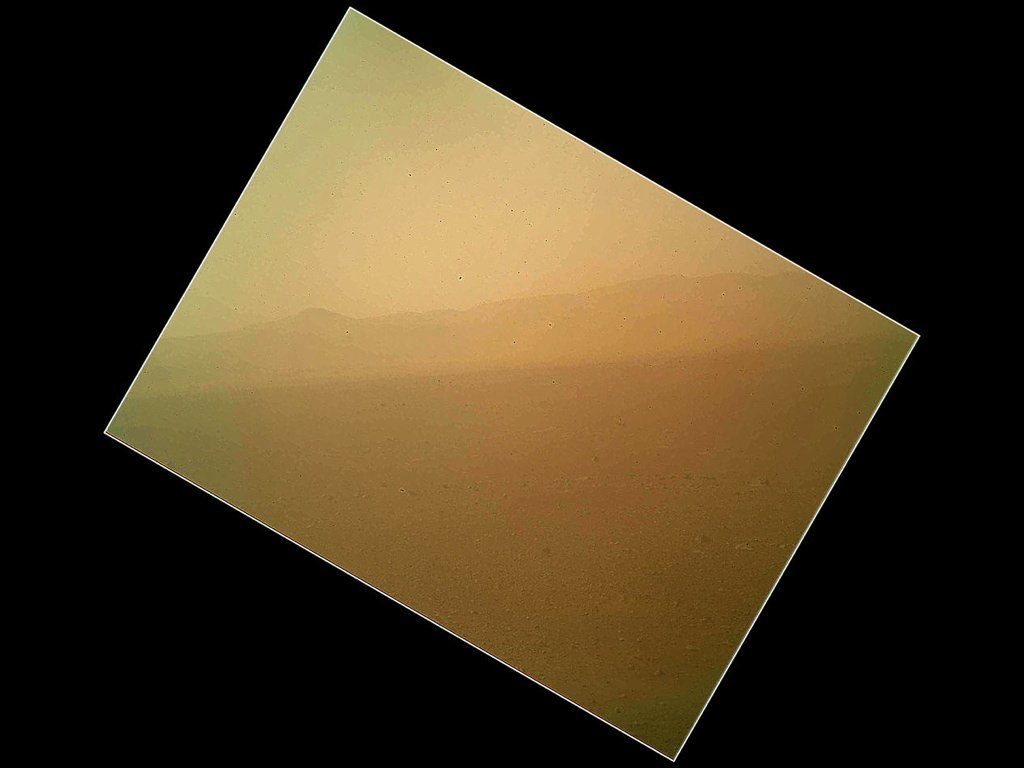
Un décor très… terrien
Cette image prise par Curiosity (et dont les couleurs ont été adaptées) montre un décor très terrien, proche de certains déserts américains. C’est évidemment une image trompeuse : Mars est bien différente de la Terre, notamment au niveau des températures et de la pression atmosphérique : la température dépasse rarement 0°C et la pression atmosphérique est souvent cent fois inférieure à celle de la Terre.
Le futur
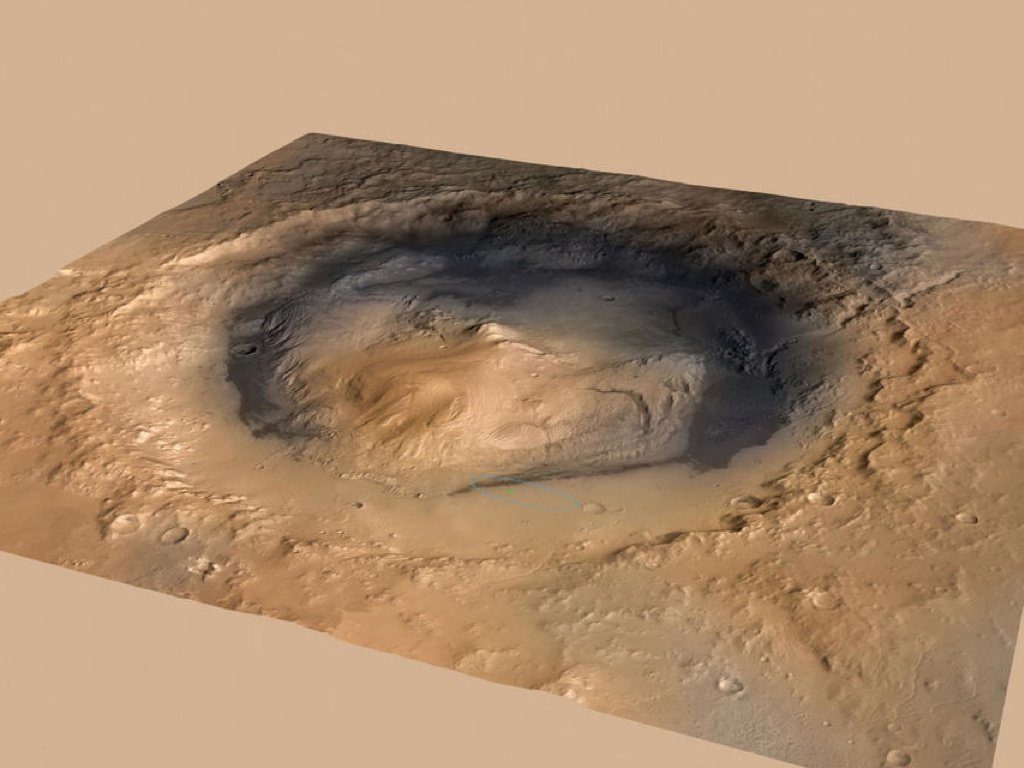
Officiellement, la mission doit durer 687 jours terrestres (689 jours martiens), mais le réacteur nucléaire du rover devrait lui permettre de fonctionner pendant plusieurs années terrestres. Un des objectifs est de vérifier s’il y a des traces de vie sur Mars, et le cratère Gale, où le rover a atterri, n’est donc qu’une première étape pour une mission qui va continuer pendant de longs mois.
Pour terminer
Pour terminer, parlons d’un échec intéressant de la NASA : Mars Climate Orbiter. Cette sonde a en effet été détruite en 1999 d’une façon assez ridicule : elle a été mise en orbite à une altitude trop faible — 57 km au lieu de 140 km — à cause d’une erreur de calcul. Erreur de calcul due au fait que certains ingénieurs utilisaient le système impérial (et donc des unités anglo-saxonnes) et que d’autres attendaient des données en système international.










